Quadrik

Eine Quadrik (von lateinisch quadra Quadrat) ist in der Mathematik die Lösungsmenge einer quadratischen Gleichung mehrerer Unbekannter. In zwei Dimensionen bildet eine Quadrik im Regelfall eine Kurve in der Ebene, wobei es sich dann um einen Kegelschnitt handelt. In drei Dimensionen beschreibt eine Quadrik im Regelfall eine Fläche im Raum, die auch Fläche zweiter Ordnung oder quadratische Fläche genannt wird. Allgemein handelt es sich bei einer Quadrik um eine algebraische Varietät, also um eine spezielle Hyperfläche, in einem endlichdimensionalen reellen Koordinatenraum. Durch eine Hauptachsentransformation lässt sich jede Quadrik auf eine von drei möglichen Normalformen transformieren. Auf diese Weise können Quadriken in verschiedene grundlegende Typen klassifiziert werden.
Quadriken werden insbesondere in der analytischen und der projektiven Geometrie untersucht. Anwendungen für Quadriken in Technik und Naturwissenschaften finden sich unter anderem in der Geodäsie (Referenzellipsoid), der Architektur (Tragwerkskonstruktion) oder der Optik (Parabolspiegel).
Die jeweilige Quadrik, d. h. Lösungsmenge, wird im Folgenden mit bezeichnet. Darüber hinaus wird auf dieser Seite zur möglichst einfachen Unterscheidung der verwendeten Symbole die folgende in der Linearen Algebra übliche Notation verwendet:

repräsentiert eine reelle Zahl,
einen Vektor (aufrecht in Kleinbuchstaben),
eine Matrix (aufrecht in Großbuchstaben).



Definition
Eine Quadrik ist eine Punktmenge im -dimensionalen reellen Koordinatenraum der Form


- ,

wobei

ein quadratisches Polynom in den Variablen ist. Mindestens einer der Polynomkoeffizienten muss dabei ungleich null sein. Zudem kann ohne Einschränkung vorausgesetzt werden, dass für alle gilt. Eine Quadrik ist damit die Nullstellenmenge eines quadratischen Polynoms mehrerer Variablen beziehungsweise die Lösungsmenge einer quadratischen Gleichung mit mehreren Unbekannten.




Beispiele
Zum Beispiel beschreibt die Menge der Punkte

eine Ellipse in der Ebene. Die Menge der Punkte

beschreibt ein einschaliges Hyperboloid im dreidimensionalen Raum.
Eigenschaften
Matrixdarstellung
In kompakter Matrixnotation kann eine Quadrik als eine Menge von Vektoren

beschrieben werden, wobei eine symmetrische Matrix und sowie Spaltenvektoren entsprechender Länge sind. Mit Hilfe der erweiterten Darstellungsmatrix




und dementsprechend erweiterten Vektor kann eine Quadrik auch kompakt durch die Menge


in homogenen Koordinaten dargestellt werden.
Typen
Bei Quadriken werden drei grundlegende Typen unterschieden. Die Entscheidung, um welchen Typ es sich bei einer gegebenen Quadrik handelt, kann anhand der Ränge der Matrizen , und getroffen werden:[1]


- Kegeliger Typ:
- Mittelpunktsquadrik:
- Parabolischer Typ:



Eine Quadrik heißt dabei ausgeartet, falls

gilt. Während nichtausgeartete Quadriken in allen Richtungen gekrümmte Hyperflächen bilden, weisen ausgeartete Quadriken in manchen Richtungen geradlinige Strukturen auf oder sind anderweitig degeneriert.
Transformationen
Quadriken lassen sich durch Ähnlichkeitsabbildungen transformieren, ohne dass sich ihr Typ dadurch verändert. Ist eine reguläre Matrix, dann erhält man durch die lineare Transformation eine neue Quadrik in den Koordinaten , die der Gleichung




genügt. Ebenso erhält man durch eine Parallelverschiebung um einen Vektor eine neue Quadrik, die die Gleichung



mit der Einheitsmatrix erfüllt. Insbesondere ändert sich der Rang der Matrizen und durch solche Affinitäten nicht.


Ist , so lassen sich beide Methoden mittels und zu kombinieren:





Da die Matrix symmetrisch ist, ist sie orthogonal diagonalisierbar, das heißt, es gibt eine orthogonale Matrix , so dass eine Diagonalmatrix ist. Damit kann die Quadrik durch die Bedingung



ausgedrückt werden. Es kommen also keine gemischt-quadratischen und keine linearen Terme mehr vor. Der Mittelpunkt der Quadrik liegt somit bei .

Normalformen
Durch eine Hauptachsentransformation lässt sich jede Quadrik auf eine der folgenden Normalformen transformieren. Hierzu wird zunächst eine orthogonale Matrix , beispielsweise eine Dreh- oder Spiegelungsmatrix, derart gewählt, dass eine Diagonalmatrix ergibt, die die Eigenwerte von in absteigender Reihenfolge enthält. Im zweiten Schritt wird die transformierte Quadrik derart um einen Vektor verschoben, dass auch die linearen Terme und der konstante Term weitestgehend verschwinden. Schließlich wird die Quadrik noch so normiert, dass der konstante Term, sofern er nicht null ist, zu eins wird. Dadurch ergeben sich die folgenden drei Normalformen:[1]


- Kegeliger Typ: mit
- Mittelpunktsquadrik: mit
- Parabolischer Typ: mit






Hinzu kommt als Spezialfall die
- Leere Menge: mit


In allen Fällen sind die Koeffizienten . Die Kennzahlen und ergeben sich dabei aus der Signatur der Matrix .



Klassifikation
Quadriken in einer Dimension
In einer Dimension ist eine Quadrik die Lösungsmenge einer quadratischen Gleichung mit einer Unbekannten, also eine Punktmenge der Form
- .

Durch Verschiebung (quadratische Ergänzung) und Normierung lassen sich die folgenden zwei Fälle unterscheiden:
| Nicht ausgeartete Quadriken | Ausgeartete Quadriken | ||
|---|---|---|---|
| Zwei Lösungen |  | Eine Lösung |  |


In dem verbleibenden Fall ergibt sich als Lösungsmenge die leere Menge. In allen Fällen ist .


Quadriken in der Ebene
In der Ebene ist eine Quadrik die Lösungsmenge einer quadratischen Gleichung mit zwei Unbekannten, also eine Punktmenge der Form
- .

Hierbei handelt es sich bis auf degenerierte Fälle um Kegelschnitte, wobei ausgeartete Kegelschnitte, bei denen die Kegelspitze in der Schnittebene enthalten ist, von nicht ausgearteten Kegelschnitten unterschieden werden. Durch Hauptachsentransformation lässt sich die allgemeine Gleichung einer Quadrik auf eine der folgenden Normalformen transformieren:
| Nicht ausgeartete Quadriken | Ausgeartete Quadriken | ||
|---|---|---|---|
| Ellipse |  | Zwei schneidende Geraden |  |
| Hyperbel |  | Zwei parallele Geraden |  |
| Parabel |  | Eine Gerade |  |
| Ein Punkt |  | ||





In den beiden verbleibenden Fällen und ergibt sich als Lösungsmenge jeweils die leere Menge. In allen Fällen sind .


Quadriken im Raum
Im dreidimensionalen Raum ist eine Quadrik die Lösungsmenge einer quadratischen Gleichung mit drei Unbekannten, also eine Punktmenge der Form
- .

Im Raum ist die Vielfalt der Quadriken deutlich größer als in der Ebene. Hier gibt es ebenfalls ausgeartete und nicht ausgeartete Quadriken. Unter den ausgearteten Quadriken finden sich dabei auch einfach gekrümmte Flächen, wie Zylinder und Kegel. Ähnlich wie in zwei Dimensionen lässt sich die allgemeine Gleichung einer Quadrik auf eine der folgenden Normalformen transformieren:[2]
| Nicht ausgeartete Quadriken | Ausgeartete Quadriken (gekrümmte Flächen) | Ausgeartete Quadriken (Ebenen u. a.) | |||
|---|---|---|---|---|---|
| Ellipsoid |  | Elliptischer Kegel |  | Zwei schneidende Ebenen |  |
| Einschaliges Hyperboloid |  | Elliptischer Zylinder |  | Zwei parallele Ebenen | 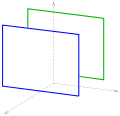 |
| Zweischaliges Hyperboloid | 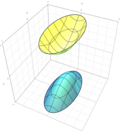 | Hyperbolischer Zylinder |  | Eine Ebene | 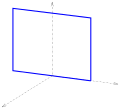 |
| Elliptisches Paraboloid |  | Parabolischer Zylinder |  | Eine Gerade | 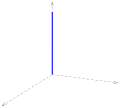 |
| Hyperbolisches Paraboloid |  | Ein Punkt |  | ||









In den drei verbleibenden Fällen , und ergibt sich als Lösungsmenge wiederum jeweils die leere Menge. In allen Fällen sind .


Für (bzw. im Fall des zweischaligen Hyperboloids) erhält man in folgenden Fällen Rotationsflächen, die auch als Drehquadriken bezeichnet werden: Rotationsellipsoid, ein- und zweischaliges Rotationshyperboloid, Rotationsparaboloid, Kreiskegel und Kreiszylinder. Regelflächen, also Flächen, die von einer einparametrigen Geradenschar erzeugt werden, sind Kegel, elliptischer und parabolischer Zylinder, Ebene, einschaliges Hyperboloid und hyperbolisches Paraboloid. Die letzteren drei Flächen werden sogar von zwei Geradenscharen erzeugt und sind die einzig möglichen doppelt gekrümmten Regelflächen im Raum.


Projektive Quadriken
Die Vielfalt der Quadriken verringert sich erheblich, wenn man sowohl den affinen Raum, in dem eine Quadrik definiert ist, als auch die Quadrik selbst projektiv abschließt. Die projektiven Erweiterungen von Ellipsen, Hyperbeln und Parabeln sind projektiv alle zueinander äquivalent, das heißt, es gibt eine projektive Kollineation, die die eine Kurve auf die andere abbildet (siehe projektiver Kegelschnitt).
Im dreidimensionalen Raum sind folgende Quadriken äquivalent:
- Ellipsoid, zweischaliges Hyperboloid und elliptisches Paraboloid,
- einschaliges Hyperboloid und hyperbolisches Paraboloid,
- elliptischer, hyperbolischer, parabolischer Zylinder und Kegel.
Verallgemeinerungen
Allgemeiner können Quadriken auch in Vektorräumen über einem beliebigen Körper, also auch über dem Körper der komplexen Zahlen oder auch über endlichen Körpern betrachtet werden.[3]
Einzelnachweise
- ↑ a b Tilo Arens, Frank Hettlich, Christian Karpfinger, Ulrich Kockelkorn, Klaus Lichtenegger, Hellmuth Stachel: Mathematik. 2. Auflage. Spektrum Akademischer Verlag, 2011, ISBN 3-8274-2347-3, S. 719.
- ↑ Kurt Meyberg, Peter Vachenauer: Höhere Mathematik 1. 6. Auflage. Springer, 2003, ISBN 978-3-540-41850-4, S. 345.
- ↑ Hanfried Lenz: Vorlesungen über projektive Geometrie. Akademische Verlagsgesellschaft Geest & Portig, Leipzig 1965, S. 155.
Literatur
- Ilja Nikolajewitsch Bronstein, Konstantin A. Semendjajew: Taschenbuch der Mathematik. Teubner-Verlag, Leipzig 1983, ISBN 3-87144-492-8, S. 283.
- Klemens Burg, Herbert Haf, Friedrich Wille: Höhere Mathematik für Ingenieure. Band II, Teubner-Verlag, Stuttgart, ISBN 3-519-22956-0, S. 341.
- dtv-Atlas zur Mathematik. Band 1, Deutscher Taschenbuch-Verlag, ISBN 3-423-03007-0, S. 200–203.
- Kurt Meyberg, Peter Vachenauer: Höhere Mathematik 1. Springer-Verlag, Berlin 1995, ISBN 3-540-59188-5, S. 343.
Weblinks
Commons: Quadric surfaces – Sammlung von Bildern, Videos und Audiodateien
Wiktionary: Quadrik – Bedeutungserklärungen, Wortherkunft, Synonyme, Übersetzungen

- V. S. Malakhovskii: Quadric. In: Michiel Hazewinkel (Hrsg.): Encyclopedia of Mathematics. Springer-Verlag und EMS Press, Berlin 2002, ISBN 1-55608-010-7 (englisch, encyclopediaofmath.org).
- Eric W. Weisstein: Quadratic Surface. In: MathWorld (englisch).
- pahio: Quadratic Surfaces. In: PlanetMath. (englisch)
- Bilder von Quadriken im Raum
- Interaktive 3D-Modelle aller Quadriken






