Ellipse







Die Mittelachse des Kegels ist so weit geneigt, dass sich die Ellipse in der Seitenansicht von rechts in wahrer Größe zeigt.

Ellipsen sind in der Geometrie spezielle geschlossene ovale Kurven. Sie zählen neben den Parabeln und den Hyperbeln zu den Kegelschnitten. Eine anschauliche Definition verwendet die Eigenschaft, dass die Summe der Abstände eines Ellipsenpunktes von zwei vorgegebenen Punkten, den Brennpunkten, für alle Punkte gleich ist. Sind die Brennpunkte identisch, erhält man einen Kreis.
Jede Ellipse lässt sich in einem geeigneten Koordinatensystem durch eine Gleichung

oder Parameterdarstellung


beschreiben. Hieran erkennt man, dass man eine Ellipse als einen an der x-Achse um und an der y-Achse um gestreckten Einheitskreis auffassen kann.


Die Ellipse (von altgriechisch ἔλλειψις élleipsis, deutsch ‚das Unterlassen, Ausbleiben, Zurückbleiben‘) wurde von Apollonios von Perge (etwa 262–190 v. Chr.)[1] eingeführt und benannt, die Bezeichnung bezieht sich auf die Exzentrizität .[2]

Ellipsen treten nicht nur als ebene Schnitte eines Kegels auf. Auch auf Zylindern, Ellipsoiden, Hyperboloiden und elliptischen Paraboloiden gibt es Ellipsen.
In der Natur treten Ellipsen in Form von ungestörten keplerschen Planetenbahnen um die Sonne auf. Auch beim Zeichnen von Schrägbildern werden häufig Ellipsen benötigt, da ein Kreis durch eine Parallelprojektion im Allgemeinen auf eine Ellipse abgebildet wird (siehe Ellipse (Darstellende Geometrie)).
Definition einer Ellipse als geometrischer Ort




Es gibt verschiedene Möglichkeiten, Ellipsen zu definieren. Neben der üblichen Definition über gewisse Abstände von Punkten ist es auch möglich, eine Ellipse als Schnittkurve zwischen einer entsprechend geneigten Ebene und einem Kegel zu bezeichnen (siehe 1. Bild) oder als affines Bild des Einheitskreises.
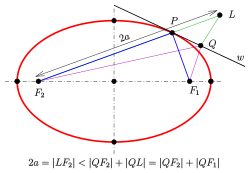
Eine Ellipse ist der geometrische Ort aller Punkte der Ebene, für die die Summe der Abstände zu zwei gegebenen Punkten und gleich einer gegebenen Konstante ist. Diese Konstante wird üblicherweise mit bezeichnet. Die Punkte und heißen Brennpunkte:



Um eine Strecke auszuschließen, setzt man voraus, dass größer als der Abstand der Brennpunkte ist. Falls die beiden Brennpunkte zusammenfallen, ist ein Kreis mit Radius . Dieser einfache Fall wird in den folgenden Überlegungen oft stillschweigend ausgeschlossen, da die meisten Aussagen über Ellipsen im Kreisfall trivial werden.
Der Mittelpunkt der Strecke heißt Mittelpunkt der Ellipse. Die Gerade durch die Brennpunkte ist die Hauptachse und die dazu orthogonale Gerade durch die Nebenachse. Die beiden Ellipsenpunkte auf der Hauptachse sind die Hauptscheitel. Der Abstand der Hauptscheitel zum Mittelpunkt ist und heißt die große Halbachse. Die beiden Ellipsenpunkte auf der Nebenachse sind die Nebenscheitel, und ihr Abstand zum Mittelpunkt ist jeweils die kleine Halbachse . Den Abstand der Brennpunkte zum Mittelpunkt nennt man die lineare Exzentrizität und die numerische Exzentrizität. Mit dem Satz des Pythagoras gilt (siehe Zeichnung). Die Gleichung kann man auch so interpretieren: Wenn der Kreis um mit Radius ist, dann ist der Abstand des Punktes zum Kreis gleich dem Abstand des Punktes zum Brennpunkt :











heißt Leitkreis der Ellipse bzgl. des Brennpunktes . Diese Eigenschaft sollte man nicht verwechseln mit der Leitlinieneigenschaft einer Ellipse (s. unten).
Mit Hilfe Dandelinscher Kugeln beweist man:
- Jeder Schnitt eines Kegels mit einer Ebene, die die Kegelspitze nicht enthält, und deren Neigung kleiner als die der Mantellinien des Kegels ist, ist eine Ellipse.
Aufgrund der Leitkreis-Eigenschaft ist eine Ellipse die Äquidistanz-Kurve zu jedem ihrer Brennpunkte und dem Leitkreis mit dem anderen Brennpunkt als Mittelpunkt.
Ellipse in kartesischen Koordinaten
Gleichung
A. Führt man kartesische Koordinaten so ein, dass der Mittelpunkt der Ellipse im Ursprung liegt, die -Achse die Hauptachse ist, und

- die Brennpunkte die Punkte ,
- die Hauptscheitel sind,


so ergibt sich für einen beliebigen Punkt der Abstand zum Brennpunkt als und zum zweiten Brennpunkt . Also liegt der Punkt genau dann auf der Ellipse, wenn die folgende Bedingung erfüllt ist:





Nach Beseitigung der Wurzeln durch geeignetes Quadrieren und Verwenden der Beziehung (s. o.) erhält man die Gleichung

- oder nach aufgelöst


sind die Nebenscheitel. Aus der Beziehung erhält man die Gleichungen

- und


Daraus ergeben sich noch die Beziehungen


Ist , so ist und die Ellipse ein Kreis.
Ist , so ist , und man nennt die Ellipse eine gleichseitige Ellipse oder Ellipse schönster Form. Diese entsteht z. B., wenn man einen Drehzylinder mit einer gegen die Zylinderachse um 45° geneigten Ebene schneidet: Die Länge der kleinen Halbachse der Ellipse ist dabei gleich dem Radius des Zylinders.




B. Die Ellipse in A. lässt sich auch mithilfe einer Bilinearform als Lösungsmenge der Gleichung auffassen.[3] Hierbei werden die Vektoren und mit dem gleichen Punkt identifiziert. Bei Einführung kartesischer Koordinaten ist die Matrix , ein Zeilenvektor und ein Spaltenvektor.






C. Eine Ellipse mit dem Mittelpunkt im Ursprung und den Brennpunkten auf der -Achse heißt auch in 1. Hauptlage. Wenn hier die obige Ellipsengleichung erwähnt wird, wird immer angenommen, dass und damit die Ellipse in 1. Hauptlage ist, was im „realen Leben“ aber nicht sein muss. Da kann durchaus auch vorkommen, was bedeutet, dass die Ellipse sich in 2. Hauptlage befindet (die Brennpunkte liegen auf der -Achse).


Aufgrund der Definition einer Ellipse gilt:
- Eine Ellipse ist symmetrisch zu ihren Achsen und damit auch zu ihrem Mittelpunkt.
(Die Symmetrieeigenschaft lässt sich auch leicht an der hier abgeleiteten Gleichung einer Ellipse erkennen.)
Halbparameter
Die halbe Länge einer Ellipsensehne, die durch einen Brennpunkt geht und zur Hauptachse senkrecht verläuft, nennt man den Halbparameter, manchmal auch nur Parameter oder auch semi-latus rectum (die Hälfte des latus rectum = ) der Ellipse. Mit Hilfe der Gleichung einer Ellipse rechnet man leicht nach, dass



gilt. Der Halbparameter hat noch die zusätzliche Bedeutung (s. unten): Der Krümmungsradius in den Hauptscheiteln ist .
Tangente
A. Für den Hauptscheitel bzw. hat die Tangente die Gleichung bzw. . Die einfachste Weise, die Gleichung der Tangente in einem Ellipsenpunkt zu bestimmen, ist, die Gleichung der Ellipse implizit zu differenzieren. Hiermit ergibt sich für die Ableitung







und damit die Punkt-Steigungs-Form der Tangente im Punkt :


Berücksichtigt man , so erhält man als Gleichung der Tangente im Punkt :


Diese Form schließt auch die Tangenten durch die Hauptscheitel ein. Letzteres gilt auch für die Vektorform
- .

B. Die in A. eingeführte Tangentengleichung lässt sich auch ohne Differentialrechnung als Spezialfall einer Polarengleichung einführen (s. u. Herleitung der Lagebeziehungen von Pol und Polare, D.). Sie entspricht einer Normalenform mit dem Normalenvektor . Von diesem lässt sich ein dazu rechtwinkeliger Richtungsvektor von ablesen. Da nur bis auf einen Skalar eindeutig ist, hat er die Formen




- ;



dies liefert den Richtungsvektor der in A. angegebenen Vektorform und auch die Steigung der dort angegebenen Punktsteigungsform.
Eine zeichnerische Bestimmung von Ellipsentangenten findet man im Artikel Ellipse (Darstellende Geometrie).
Gleichung einer verschobenen Ellipse
Verschiebt man die obige Ellipse so, dass der Mittelpunkt der Punkt ist, ergibt sich die Mittelpunktsform einer Ellipse, deren Achsen parallel zu den Koordinatenachsen sind:


Parameterdarstellungen
- Standarddarstellung
Die übliche Parameterdarstellung einer Ellipse verwendet die Sinus- und Kosinus-Funktion. Wegen beschreibt


die Ellipse

Verschiedene Möglichkeiten, den Parameter geometrisch zu interpretieren, werden im Abschnitt Ellipsen zeichnen angegeben.
- Rationale Parameterdarstellung


Mit der Substitution und trigonometrischen Formeln erhält man


und damit die rationale Parameterdarstellung einer Ellipse:

Die rationale Parameterdarstellung hat folgende Eigenschaften (s. Bild):
- Für wird der positive Hauptscheitel dargestellt: ; für der positive Nebenscheitel: .
- Übergang zur Gegenzahl des Parameters spiegelt den dargestellten Punkt an der -Achse: .
- Übergang zum Kehrwert des Parameters spiegelt den dargestellten Punkt an der -Achse: .
- Der negative Hauptscheitel kann mit keinem reellen Parameter dargestellt werden. Die Koordinaten desselben sind die Grenzwerte der Parameterdarstellung für unendliches positives oder negatives : .








Rationale Parameterdarstellungen der Kegelschnitte (Ellipse, Hyperbel, Parabel) spielen im CAD-Bereich bei quadratischen rationalen Bezierkurven eine wichtige Rolle.[4]
- Tangentensteigung als Parameter
Eine Parameterdarstellung, die die Tangentensteigung in dem jeweiligen Ellipsenpunkt verwendet, erhält man durch Differentiation der Parameterdarstellung :



Mit Hilfe trigonometrischer Formeln ergibt sich

Ersetzt man in der Standarddarstellung und , erhält man schließlich



Dabei ist die Tangentensteigung im jeweiligen Ellipsenpunkt, die obere und die untere Hälfte der Ellipse. Die Punkte mit senkrechten Tangenten (Scheitel ) werden durch diese Parameterdarstellung nicht erfasst.
Die Gleichung der Tangente im Punkt hat die Form . Der -Abschnitt ergibt sich durch Einsetzen der Koordinaten des zugehörigen Ellipsenpunktes :







Diese Hauptform der Tangentengleichung ist ein wesentliches Hilfsmittel bei der Bestimmung der orthoptischen Kurve einer Ellipse.
Bemerkung: Die Hauptform der Tangentengleichung und die Koordinaten von lassen sich auch ohne Differentialrechnung und ohne trigonometrische Formeln herleiten, indem die Tangente als Spezialfall einer Polare aufgefasst wird (s. u. Herleitung der Lagebeziehungen von Pol und Polare, D.)
- Verschobene Ellipse
Eine verschobene Ellipse mit Mittelpunkt wird durch

beschrieben.
Eine Parameterdarstellung einer beliebigen Ellipse ist in dem Abschnitt Ellipse als affines Bild des Einheitskreises enthalten.
Eigenschaften
Brennpunkteigenschaft

Die Verbindungslinie zwischen einem Brennpunkt und einem Punkt der Ellipse heißt Brennlinie, Leitstrahl oder Brennstrahl. Ihren Namen erhielten Brennpunkte und Brennstrahlen aufgrund der folgenden Eigenschaft:
- Der Winkel zwischen den beiden Brennstrahlen in einem Punkt der Ellipse wird durch die Normale in diesem Punkt halbiert.
- Anwendungen
- Der Einfallswinkel, den der eine Brennstrahl mit der Tangente bildet, ist gleich dem Ausfallswinkel, den die Tangente mit dem anderen Brennstrahl bildet. Ein Lichtstrahl, der von einem Brennpunkt ausgeht, wird demnach an der Ellipsentangente so reflektiert, dass er den anderen Brennpunkt trifft. Bei einem ellipsenförmigen Spiegel treffen sich demnach alle von einem Brennpunkt ausgehenden Lichtstrahlen in dem anderen Brennpunkt.
- Da alle Wege von einem zum anderen Brennpunkt (entlang zusammengehöriger Brennstrahlen) gleich lang sind, wird z. B. Schall durch konstruktive Interferenz „verstärkt“ übertragen.
- Die Tangente im Ellipsenpunkt ist die Winkelhalbierende des Außenwinkels. Da Winkelhalbierenden leicht zu konstruieren sind, bietet die Brennpunkteigenschaft eine einfache Methode, die Tangente in einem Ellipsenpunkt zu konstruieren (Eine weitere Tangentenkonstruktion wird in Ellipse (Darstellende Geometrie) beschrieben.).
Zwei Ellipsen mit denselben Brennpunkten nennt man konfokal. Durch jeden Punkt, der nicht zwischen den Brennpunkten liegt, gibt es genau eine Ellipse mit den Brennpunkten . Zwei konfokale Ellipsen haben keinen Schnittpunkt (s. Definition einer Ellipse).

Beweis der Brennpunkteigenschaft
Da die Tangente senkrecht zur Normalen verläuft, ist die obige Behauptung bewiesen, wenn die analoge Aussage für die Tangente gilt:
- Der Außenwinkel der Brennstrahlen in einem Ellipsenpunkt wird von der Tangente in diesem Punkt halbiert (s. Bild).

Es sei der Punkt auf der Geraden mit dem Abstand zum Brennpunkt ( ist die große Halbachse der Ellipse). Die Gerade sei die Winkelhalbierende der Außenwinkel der Brennstrahlen . Um nachzuweisen, dass die Tangente ist, zeigt man, dass auf kein weiterer Ellipsenpunkt liegen kann. Anhand der Zeichnung und der Dreiecksungleichung erkennt man, dass




gilt. Dies bedeutet, dass ist. Wenn ein Punkt der Ellipse wäre, müsste die Summe aber gleich sein.


Bemerkung: Ein Beweis mit Mitteln der analytischen Geometrie befindet sich im Beweisarchiv.[5]
Natürliches Vorkommen und Anwendung in der Technik:
Die Decken mancher Höhlen ähneln einer Ellipsenhälfte. Befindet man sich – mit den Ohren – in einem Brennpunkt dieser Ellipse, hört man jedes Geräusch, dessen Ursprung im zweiten Brennpunkt liegt, verstärkt („Flüstergewölbe“). Diese Art der Schallübertragung funktioniert in einigen Stationen der Pariser Métro sogar von Bahnsteig zu Bahnsteig. Das gleiche Prinzip der Schallfokussierung wird heute zur Zertrümmerung von Nierensteinen mit Stoßwellen verwendet. Auch im lampengepumpten Nd:YAG-Laser wird ein Reflektor in Form einer Ellipse verwendet. Die Pumpquelle – entweder eine Blitzlampe oder eine Bogenlampe – wird in dem einen Brennpunkt positioniert, und der dotierte Kristall wird in den anderen Brennpunkt gelegt.
Direktrix

Für eine echte Ellipse, d. h. , bezeichnet man eine Parallele zur Nebenachse im Abstand als Direktrix oder Leitlinie. Für einen beliebigen Punkt der Ellipse ist das Verhältnis seines Abstands von einem Brennpunkt zu dem Abstand von der Direktrix auf der entsprechenden Seite der Nebenachse gleich der numerischen Exzentrizität:



- Es ist


Beweis:
Mit sowie und den binomischen Formeln ist




- .

Die Umkehrung dieser Aussage gilt auch und kann zu einer weiteren Definition einer Ellipse benutzt werden (ähnlich wie bei einer Parabel):
- Für einen Punkt (Brennpunkt), eine Gerade (Leitlinie) nicht durch und eine reelle Zahl mit ist die Menge der Punkte (geometrischer Ort), für die der Quotient der Abstände zu dem Punkt und der Geraden gleich ist, eine Ellipse:




Die Wahl , also die Exzentrizität eines Kreises, ist in diesem Zusammenhang nicht erlaubt. Man kann als Leitlinie eines Kreises die unendlich entfernte Gerade auffassen.

Beweis:
Es sei und ein Punkt der Kurve. Die Leitlinie hat die Gleichung . Mit und der Beziehung ergibt sich





- und


Die Substitution liefert


Dies ist die Gleichung einer Ellipse () oder einer Parabel () oder einer Hyperbel (). All diese nicht-ausgearteten Kegelschnitte haben den Ursprung als Scheitel gemeinsam (s. Bild).


Für führt man neue Parameter und ein; die obige Gleichung wird dann zu



was die Gleichung einer Ellipse mit Mittelpunkt , der -Achse als Hauptachse und den Halbachsen ist.

Allgemeiner Fall:
Für den Brennpunkt und die Leitlinie erhält man die Gleichung



Die rechte Seite der Gleichung benutzt die Hessesche Normalform einer Geraden, um den Abstand eines Punktes von einer Geraden zu berechnen.

Konstruktion der Leitlinie:
Wegen sind der Punkt der Leitlinie (siehe Bild) und der Brennpunkt bezüglich der Spiegelung am großen Scheitelkreis (im Bild grün) invers. Damit kann wie im Bild gezeigt aus mit Hilfe des großen Scheitelkreises konstruiert werden. Eine weitere Begründung für die Konstruktion liefert die Tatsache, dass der Brennpunkt und die Leitlinie sowohl bezüglich der Ellipse als auch bezüglich des großen Scheitelkreises ein Pol-Polare-Paar (siehe unten) bilden.



Konjugierte Durchmesser

- Betrachtet man zu einem beliebigen Ellipsendurchmesser (einer Ellipsensehne durch den Ellipsenmittelpunkt) alle parallelen Sehnen, so liegen deren Mittelpunkte ebenfalls auf einem Ellipsendurchmesser . Man nennt den zu konjugierten Durchmesser.[6]
- Bildet man zum konjugierten Durchmesser erneut den konjugierten Durchmesser, so erhält man wieder den ursprünglichen. In der Zeichnung stimmt also der zu konjugierte Durchmesser mit dem ursprünglichen Durchmesser überein.
- Die Tangenten in den Endpunkten eines Durchmessers (etwa ) sind parallel zum konjugierten Durchmesser (im Beispiel ).
- Haupt- und Nebenachse sind das einzige Paar orthogonaler konjugierter Durchmesser.
- Ist die Ellipse ein Kreis, so sind genau die orthogonalen Durchmesser (auch) konjugiert.
- Sind konjugierte Durchmesser nicht orthogonal, so ist das Produkt ihrer Steigungen .
- Seien , konjugierte Durchmesser. Dann ist . (Satz des Apollonius)
- Für die Ellipse mit der Gleichung und der Parameterdarstellung gilt:






- ( Vorzeichen: (+,+) oder (−,−) )
- ( Vorzeichen: (−,+) oder (+,−) )
- liegen auf konjugierten Durchmessern und es ist
- Im Fall eines Kreises gilt




Konjugierte Durchmesser (erstrangig von Ellipsen) werden auch auf einer eigenen Wikipedia-Seite behandelt, ebenso der Satz des Apollonius (samt Beweis). Ein analytischer Gesamt-Beweis sämtlicher hier aufgeführter Aussagen, der von der gemeinsamen Bilinearform zweier Ursprungsgeraden ausgeht, findet sich im Beweisarchiv. Dieser Beweis benötigt weder trigonometrische Funktionen noch Parameterdarstellungen noch eine affine Abbildung.[7]
Eine Anwendungsmöglichkeit im Bereich des technischen Zeichnens besteht in der Möglichkeit, den höchsten Punkt einer Ellipse oder eines Ellipsenbogens beliebiger Lage über einer Linie zu finden – nützlich z. B. für korrekte 2D-Darstellungen nicht-orthogonaler Ansichten zylindrischer Körper oder abgerundeter Kanten ohne Verwendung von 3D-Programmen. Wichtig ist dies für den sauberen Anschluss tangential von der Ellipse weg laufender Linien. Hierzu sind in die Ellipse oder den Ellipsenbogen zwei Sehnen parallel zur gewünschten Tangentenrichtung und die durch die Mittelpunkte der beiden Sehnen definierte Linie des zugehörigen konjugierten Durchmessers einzuzeichnen. Der Schnittpunkt dieser Linie mit der Ellipse oder dem Ellipsenbogen definiert den Anschlusspunkt der Tangente (und normalerweise den Endpunkt des Ellipsenbogens).
Orthogonale Tangenten
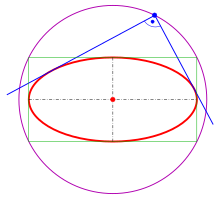
Für die Ellipse liegen die Schnittpunkte orthogonaler Tangenten auf dem Kreis .

Diesen Kreis nennt man die orthoptische Kurve der gegebenen Ellipse, es ist der Umkreis des Rechtecks, das die Ellipse umschreibt.
Pol-Polare-Beziehung
Führt man kartesische Koordinaten so ein, dass der Mittelpunkt der Ellipse im Ursprung liegt, so kann eine beliebige Ellipse mit der Gleichung beschrieben werden (s. o. Abschnitt Gleichung). Weiter ordnet für eine vorgegebene Ellipse eine Funktion je einem Punkt die Gerade zu. Bezüglich heißt Pol, die zugeordnete Gerade Polare. ist eine Bijektion; die inverse Funktion bildet je eine Polare auf einen Pol ab. Der Ellipsenmittelpunkt ist in keiner so definierten Polare enthalten, entsprechend existiert zu keine Polare. Die angegebene Gleichung der Polare lässt sich als Normalenform mit dem zugehörigen Normalenvektor auffassen.





Eine solche Beziehung zwischen Punkten und Geraden, die durch einen Kegelschnitt vermittelt wird, nennt man Pol-Polare-Beziehung oder einfach Polarität. Pol-Polare-Beziehungen gibt es auch für Hyperbeln und Parabeln, siehe auch Pol und Polare.
Zu Pol und Polare gelten folgende Lagebeziehungen:
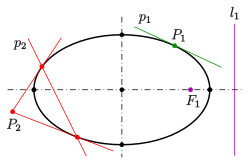
- Der Brennpunkt und die Leitlinie sind polar zueinander. Da beide auch polar bezüglich des Scheitelkreises sind, lässt sich die Leitlinie auch mit Hilfe von Zirkel und Lineal konstruieren (siehe hierzu auch Kreisspiegelung). (1)
- Genau dann, wenn der Pol außerhalb der Ellipse liegt, hat die Polare zwei Punkte mit der Ellipse gemeinsam (s. Bild: ). (2)
- Genau dann, wenn der Pol auf der Ellipse liegt, hat die Polare genau einen Punkt mit der Ellipse gemeinsam (= die Polare ist eine Tangente; s. Bild: ). (3)
- Genau dann, wenn der Pol innerhalb der Ellipse liegt, hat die Polare keinen Punkt mit der Ellipse gemeinsam (s. Bild: ). (4)
- Jeder gemeinsame Punkt einer Polare und einer Ellipse ist Berührpunkt einer Tangente vom zugehörigen Pol an die Ellipse (s. Bild: ). (5)
- Der Schnittpunkt zweier Polaren ist der Pol der Geraden durch die Pole. (6)





Herleitung der Lagebeziehungen von Pol und Polare; alternative Herleitung einer Tangenten- und einer Ellipsengleichung
A. Ist eine Polare parallel zur -Achse, so hat sie auch die Form . Mit dem zugehörigen Normalenvektor ist der zugehörige Pol Insbesondere folgt für die Polarität (1) von Brennpunkt und Direktrix.




Einsetzen der betrachteten Polare in die Mittelpunktform einer Ellipse ergibt für die Ordinate eines beliebigen Schnittpunkts die Bedingung ; die Diskriminante dieser quadratischen Gleichung in hat bis auf einen positiven Faktor die Form

- .

B. Ist eine Polare nicht parallel zur -Achse, so hat sie die Hauptform . Wegen lässt sich diese in die Normalenform umformen. Vergleich mit der Normalenform ergibt als Darstellung Koordinaten des Pols mit den Parametern der Hauptform:


- .

Einsetzen der Hauptform in die Mittelpunktform einer Ellipse ergibt für die Abszisse eines beliebigen Schnittpunkts die Bedingung ; die Diskriminante dieser quadratischen Gleichung in hat bis auf einen positiven Faktor die Form


C. Insgesamt erlaubt der Term bzw. für eine beliebige Polare folgende Unterscheidung paarweise disjunkter Fälle:


- Für hat die Polare mit der Ellipse keinen Punkt gemeinsam, und der Pol liegt innerhalb der Ellipse. Hieraus folgt (2).
- Für hat die Polare mit der Ellipse genau einen Punkt gemeinsam, und der Pol liegt auf der Ellipse. Also ist die Polare eine Tangente an die Ellipse, der Pol ihr Berührpunkt (s. Bild: ). Hieraus folgt (3).
- Für hat die Polare mit der Ellipse zwei Punkte gemeinsam, und der Pol liegt außerhalb der Ellipse. Hieraus folgt (4).



D. Ist eine Tangente nicht senkrecht, so ergibt Auflösung der Gleichung nach und Einsetzen von die Hauptform der Tangente:

;

Einsetzen von in die Koordinaten des Berührpunkts ergibt die Koordinaten der Parameterdarstellung einer Ellipse mit der Steigung als Parameter: ;


diese Parameterdarstellung erfasst die Hauptscheitel nicht.
E. Ausgehend von der im Abschnitt „Gleichung“, B. aufgeführten Bilinearform der Ellipse hat die Polare zum Punkt die Normalenformen
- mit dem Normalenvektor und
- mit dem Normalenvektor .




Ist ein Punkt der Ellipse, so beschreiben auch diese Gleichungen eine Tangente.
Diese koordinatenfreie rechnerische Darstellung der Polare eignet sich für Beweise. Mit den Koordinatendarstellungen und sowie den im Abschnitt „Gleichung“ angegebenen Matrizenkoordinaten für entsteht durch Auswertung der Matrizenprodukte wieder die im Abschnitt Pol-Polare-Beziehung angegebene Gleichung .


Beweis von (5) („Jeder gemeinsame Punkt einer Polare und einer Ellipse ist Berührpunkt einer Tangente vom zugehörigen Pol an die Ellipse.“):
Da die Ellipsenpunkte auf der Polare zu liegen, gilt und . Fasst man in diesen Gleichungen nicht , sondern bzw. als Normalenvektor auf, so besagen sie, dass die Tangenten in den Ellipsenpunkten den Punkt gemeinsam haben.






Beweis von (6) („Der Schnittpunkt zweier Polaren ist der Pol der Gerade durch die Pole.“):
Für einen Schnittpunkt zweier Polaren zu und gilt und . Fasst man in diesen Gleichungen nicht bzw. , sondern als Normalenvektor auf, so besagen sie, dass auf der Polare zu die Punkte , liegen. Weiter zeigt die Betrachtung der Parameterform mit










die punktweise Gleichheit der Gerade mit der Polare zu .

Ellipse als affines Bild des Einheitskreises
Eine andere Definition der Ellipse benutzt eine spezielle geometrische Abbildung, nämlich die Affinität. Hier ist die Ellipse als affines Bild des Einheitskreises definiert.[8]
Parameterdarstellung
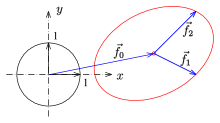
Eine affine Abbildung in der reellen Ebene hat die Form , wobei eine reguläre Matrix (Determinante nicht 0) und ein beliebiger Vektor ist. Sind die Spaltenvektoren der Matrix , so wird der Einheitskreis auf die Ellipse






abgebildet. ist der Mittelpunkt und sind zwei konjugierte Halbmesser (s. u.) der Ellipse. stehen i. A. nicht senkrecht aufeinander. D. h., und sind i. A. nicht die Scheitel der Ellipse. Diese Definition einer Ellipse liefert eine einfache Parameterdarstellung (s. u.) einer beliebigen Ellipse.


- Scheitel, Scheitelform
Da in einem Scheitel die Tangente zum zugehörigen Ellipsendurchmesser senkrecht steht und die Tangentenrichtung in einem Ellipsenpunkt ist, ergibt sich der Parameter eines Scheitels aus der Gleichung



und damit aus .
(Es wurden die Formeln benutzt.)


Falls ist, ist und die Parameterdarstellung schon in Scheitelform.


Die 4 Scheitel der Ellipse sind

Die Scheitelform der Parameterdarstellung der Ellipse ist

- Halbachsen
Mit den Abkürzungen folgt aus den beiden Sätzen von Apollonios:


Löst man nach auf, ergibt sich (s. Steiner-Ellipse)


- Flächeninhalt
Aus dem zweiten Satz von Apollonios folgt:
Der Flächeninhalt einer Ellipse ist


Für Beispiel 3 ist

- Beispiele
- liefert die übliche Parameterdarstellung der Ellipse mit der Gleichung .

Folge von Ellipsen: rotiert und so skaliert, dass zwei aufeinanderfolgende Ellipsen sich berühren - liefert die Parameterdarstellung der Ellipse, die aus durch Drehung um den Winkel und anschließende Verschiebung um hervorgeht. Die Parameterdarstellung ist schon in Scheitelform. D. h., und sind die Scheitel der Ellipse.

Transformation auf Scheitelform (Beispiel 3) - Die Parameterdarstellung






- einer Ellipse ist nicht in Scheitelform.
- Der Scheitelparameter ergibt sich aus zu .
- Die Scheitelform der Parameterdarstellung ist:
- Die Scheitel sind: und
- die Halbachsen:






Implizite Darstellung
Löst man die Parameterdarstellung mit Hilfe der Cramerschen Regel nach auf und verwendet , erhält man die implizite Darstellung


- .

Für Beispiel 3 ergibt sich:

Dreht man die Ellipse mit der Gleichung um den Nullpunkt (Mittelpunkt), hat ihre Gleichung die Form
- wobei ist.


Liegt umgekehrt die Gleichung einer gedrehten Ellipse vor und man möchte die Vorteile der hier beschriebenen Parameterdarstellung nutzen, bestimmt man die Ortsvektoren zweier konjugierter Punkte. Wählt man als ersten Punkt , ergibt sich:

Beispiel: Für die Ellipse mit der Gleichung sind


die Ortsvektoren zweier konjugierter Punkte.
Ellipse im Raum
Sind die Vektoren aus dem , so erhält man eine Parameterdarstellung einer Ellipse im Raum.


Peripheriewinkelsatz und 3-Punkteform für Ellipsen
Kreise
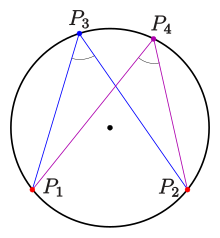
Ein Kreis mit der Gleichung ist durch drei Punkte nicht auf einer Geraden eindeutig bestimmt. Eine einfache Methode, die Parameter zu bestimmen, benutzt den Peripheriewinkelsatz für Kreise:



- Vier Punkte (s. Bild) liegen genau dann auf einem Kreis, wenn die Winkel bei und gleich sind.



Üblicherweise misst man einen einbeschriebenen Winkel in Grad oder Radiant. Um die Gleichung eines Kreises durch 3 Punkte zu bestimmen, ist das folgende Winkelmaß geeigneter:
- Um den Winkel zwischen zwei Geraden mit den Gleichungen zu messen, wird hier der folgende Quotient benutzt:
- Dieser Quotient ist der Kotangens des Schnittwinkels der beiden Geraden.


Peripheriewinkelsatz für Kreise:
Für vier Punkte , keine drei auf einer Geraden (s. Bild), gilt:
- Die vier Punkte liegen genau dann auf einem Kreis, wenn die Winkel bei und im obigen Winkelmaß gleich sind, d. h., wenn:

Das Winkelmaß ist zunächst nur für Sekanten, die nicht parallel zur -Achse sind, verfügbar. Die angegebene vereinfachte Formel ist aber schließlich auch für diese Ausnahmen gültig.
Eine Folge des Peripheriewinkelsatzes in dieser Form ist:
3-Punkteform einer Kreisgleichung:
- Die Gleichung des Kreises durch die 3 Punkte nicht auf einer Geraden ergibt sich durch Umformung der Gleichung (Beseitigung der Nenner und quadratische Ergänzung):


Diese Formel lässt sich durch Verwenden der Ortsvektoren, des Skalarproduktes und der Determinante übersichtlicher schreiben:

Beispiel:
Für ergibt sich zunächst die 3-Punkteform

- und schließlich


Ellipsen
In diesem Abschnitt werden nur Ellipsen betrachtet mit Gleichungen

für die der Quotient fest (invariant) ist. Mit der Abkürzung erhält man die geeignetere Form


- und fest.


Die Achsen solcher Ellipsen sind parallel zu den Koordinatenachsen und ihre Exzentrizität (s. oben) ist fest. Die Hauptachse ist parallel zur -Achse, falls ist, und parallel zur -Achse, falls ist.



Wie beim Kreis ist so eine Ellipse durch drei Punkte nicht auf einer Geraden eindeutig bestimmt.
Für diesen allgemeineren Fall führt man das folgende Winkelmaß ein:[9][10]
- Um den Winkel zwischen zwei Geraden mit den Gleichungen zu messen, wird hier der folgende Quotient benutzt:

Peripheriewinkelsatz für Ellipsen:
Für vier Punkte keine drei auf einer Geraden (s. Bild) gilt:
- Die vier Punkte liegen genau dann auf einer Ellipse mit der Gleichung , wenn die Winkel bei und im obigen Winkelmaß gleich sind, d. h., wenn:


Das Winkelmaß ist zunächst nur für Sekanten, die nicht parallel zur -Achse sind, verfügbar. Die angegebene vereinfachte Formel ist aber schließlich auch für diese Ausnahmen gültig.
Der Beweis ergibt sich durch einfaches Nachrechnen. Dabei kann man im Fall „Punkte auf einer Ellipse …“ annehmen, dass der Mittelpunkt der Ellipse der Ursprung ist.
Eine Folge des Peripheriewinkelsatzes in dieser Form ist:
3-Punkteform einer Ellipsengleichung:
Die Gleichung der Ellipse durch die 3 Punkte nicht auf einer Geraden ergibt sich durch Umformung der Gleichung (Beseitigung der Nenner und quadratische Ergänzung):

Diese Formel lässt sich (wie beim Kreis) übersichtlicher darstellen durch

wobei das hier geeignete Skalarprodukt beschreibt.


Beispiel:
Für und ergibt sich zunächst die 3-Punkteform

- und schließlich .


Ellipsen zeichnen

Ellipsen treten in der darstellenden Geometrie als Bilder von Kreisen auf. Es ist also wichtig, geeignete Werkzeuge zur Verfügung zu haben, mit denen man Ellipsen zeichnen kann. Es gibt im Wesentlichen drei Typen von Verfahren, mit denen Ellipsen gezeichnet werden:
- einzelne Punkte, die man mit einem Kurvenlineal zu einer glatten Kurve verbindet,
- stetige Konstruktionen, die man technisch als Ellipsenzirkel realisieren kann und
- eine Approximation einer Ellipse mit Hilfe ihrer Scheitelkrümmungskreise und eines Kurvenlineals.
Den meisten Ellipsenzirkeln liegen die unten beschriebenen zwei Papierstreifenmethoden zugrunde. Diese waren schon den Griechen (Archimedes und Proklos) bekannt, wie man auch und vieles andere mehr in dem eigenständigen Artikel Ellipsograph des Archimedes nachlesen kann. Wenn kein Ellipsenzirkel zur Verfügung steht, ist die Approximation mit Hilfe der Scheitelkrümmungskreise die schnellste und beste Methode, eine Ellipse zu zeichnen.
Für jede hier beschriebene Methode ist die Kenntnis der beiden (Symmetrie-)Achsen und der Halbachsen erforderlich. Ist dies nicht der Fall, was in der darstellenden Geometrie oft vorkommt, so muss man wenigstens den Mittelpunkt und zwei konjugierte Halbmesser kennen. Mit Hilfe der Rytz-Konstruktion lassen sich dann die Scheitel und damit die Achsen und Halbachsen ermitteln. Nur die Parallelogramm-Methode (s. unten) bietet die Möglichkeit, zu zwei konjugierten Halbmessern direkt (ohne Rytz) einzelne Punkte einer Ellipse zu konstruieren.
Gärtnerkonstruktion
Die definierende Eigenschaft einer Ellipse – die Summe der Abstände zu zwei Punkten ist konstant – nutzt die Gärtnerkonstruktion als einfache Möglichkeit, eine Ellipse zu zeichnen. Hierzu benötigt man einen Faden der Länge und zwei Reißbrettstifte (oder Nägel, Stifte, …), um die beiden Enden des Fadens in den Brennpunkten der zu zeichnenden Ellipse zu befestigen. Führt man einen Stift mit Hilfe des gespannten Fadens (s. Bild) über die Zeichenfläche, so entsteht die durch die Länge des Fadens und die Lage der Brennpunkte definierte Ellipse. Diese einfache Methode gibt Gärtnern die Möglichkeit, ellipsenförmige Beete anzulegen, was der Methode den Namen gab.

Eine Variation der Gärtnerkonstruktion zur Konstruktion konfokaler Ellipsen geht auf den irischen Bischof Charles Graves zurück.
Antiparallelogramm

Beim Abrollen eines Antiparallelogramms zeichnet der Schnittpunkt der beiden langen Stäbe eine Ellipse (blau im Bild). Die Enden des kurzen statischen Stabs definieren die Brennpunkte der Ellipse. Durch die symmetrische Geometrie ergibt sich theoretisch auch um den kurzen umlaufende Stab eine Ellipse (im Bild grün). Diese Konstruktionsvariante ist mit der Gärtnerkonstruktion verwandt. Betrachtet man nur den Anteil innerhalb der statischen Ellipse und ersetzt die beiden inneren Teilstücke der Stäbe mit einer Schur, ergibt sich die äquivalente Gärtnerkonstruktion. Die Mechanik des bewegten Antiparallelogramms ist ein Koppelgetriebe. Die innere Ellipse entspricht der Rastpolbahn, die äußere Ellipse ist die Gangpolbahn des umlaufenden kurzen Stabs.
Ellipsenzirkel des Frans van Schooten

(▶ Animation ansehen)
Im Jahr 1657 veröffentlichte Frans van Schooten in seinem Werk EXERCITATIONUM MATHEMATICARUM LIBRI QUINQUE[11] in LIBER IV[12] die Methode Gärtnerkonstruktion[13] und ein paar Seiten weiter einen Ellipsenzirkel.[14] Basis für den Ellipsenzirkel ist die Gärtnerkonstruktion.
- Anzumerken ist: In der nebenstehenden originären Darstellung Ellipsenzirkel des Frans van Schooten kann die Ellipsenlinie nicht durch den Scheitelpunkt gezogen werden, sondern nur, z. B. im Uhrzeigersinn, bis die Führungsschiene an der Zirkelnadel im Punkt der Raute anliegt. Damit der Ellipsenzirkel eine komplette Ellipsenlinie zeichnen kann (auch durch die Scheitelpunkte und ), ist es erforderlich, dass zumindest einmal die Einstechposition der Zirkelnadeln und in den Brennpunkten der Ellipse getauscht wird.





Die Kurve ist eine exakte Ellipse.
Die Hauptelemente des rautenförmigen Ellipsenzirkels sind die fünf gleich langen Stäbe mit ihren Gelenkpunkt-Abständen , , , und als Führungsschiene sowie der deutlich längere Diagonalstab ab durch mit dem Klemmelement für den Spielausgleich. Die Führungsschiene mit dem Gelenkpunkt-Abstand und der Diagonalstab überkreuzen sich im Punkt und sind über Führungsnuten mithilfe eines sogenannten Gleitsteins dreh- und schiebbar verbunden. In diesem Gleitstein ist auch der Zeichenstift und ggf. der Handgriff montiert. Der zweite Gleitstein befindet sich im Gelenkpunkt . In den Gelenkpunkten und des Ellipsenzirkels sind die Zirkelnadeln befestigt.





Die Länge z. B. des Stabes ist gleich der Länge der Hauptachse . Der Abstand der Gelenkpunkte und bestimmt die Länge der Nebenachse. Je kleiner dieser Abstand ist, umso mehr ähnelt die Ellipse einem Kreis.


Betrachtet man eine Hälfte der Raute , d. h. das gleichschenklige Dreieck , so ist der Diagonalstab ab durch als Mittelsenkrechte des Gelenkpunkt-Abstandes erkennbar, die den Stab mit Gelenkpunkt-Abstand in schneidet. Dadurch entsteht das zweite gleichschenklige Dreieck mit den Schenkeln und . Wird nun der Ellipsenzirkel von Hand bewegt, durchläuft der Punkt den Kreis um den Punkt mit dem Radius (gleich ), dabei wirkt der Diagonalstab mit seinem Gelenkpunkt-Abstand konstant als Mittelsenkrechte der sich kontinuierlich verändernden gleichschenkligen Dreiecke und . Daraus folgt: In jeder gedrehten Stellung des Ellipsenzirkels gilt











Werden in die weiter oben beschriebene Definition einer Ellipse als geometrischer Ort die Bezeichnungen der betreffenden Punkte, u. a. die Brennpunkte und , aus der Darstellung des Ellipsenzirkels eingesetzt, ergibt sich

Damit wird aufgezeigt: Die mit dem rautenförmigen Ellipsenzirkel gezogenen Kurven sind Ellipsen.
Um eine Ellipse zu zeichnen, sticht man zuerst zur Lagefixierung des Ellipsenzirkels die Zirkelnadeln der Gelenkpunkte und in die Brennpunkte der Ellipse und zieht anschließend mithilfe des Handgriffs oder ggf. nur mit dem Zeichenstift die Ellipsenlinie.
Parameterdarstellung mit Sinus und Kosinus
Die übliche Parameterdarstellung einer Ellipse verwendet die Sinus- und Kosinusfunktion. Wegen beschreibt
die Ellipse Mit Hilfe dieser Darstellung lassen sich die folgenden Ellipsenkonstruktionen leicht verstehen.

Punktkonstruktion nach de La Hire
Die nach Philippe de La Hire (1640–1718) benannte Punktkonstruktion benutzt die beiden Scheitelkreise,[15] das sind die Kreise um den Mittelpunkt der Ellipse mit den Halbachsen als Radien. Der Parameter wird hier als der Steigungswinkel eines von ausgehenden Strahls interpretiert. Mit der in der Zeichnung angegebenen Methode wird ein Punkt mit den Koordinaten , also ein Ellipsenpunkt, konstruiert. Dieses Konstruktionsverfahren war allerdings auch schon in der Spätantike bekannt und ging damals auf Proklos Diadochos (412–485) zurück.[16]

-
 Ellipsenkonstruktion nach Diadochos
Ellipsenkonstruktion nach Diadochos -
 Animation der Methode von Diadochos
Animation der Methode von Diadochos


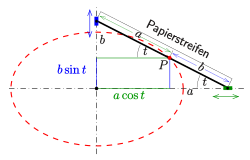
Papierstreifenmethoden
Die beiden Papierstreifenmethoden verwenden zwei weitere Möglichkeiten der geometrischen Interpretation des Parameters der obigen Parameterdarstellung einer Ellipse. Sie liefern die Grundlagen der meisten Ellipsenzirkel.
1. Methode
Die erste Methode verwendet einen Papierstreifen der Länge . Der Punkt, in dem sich die Halbachsen treffen, wird mit markiert. Wenn der Streifen nun so bewegt wird, dass die beiden Enden jeweils auf einer Achse gleiten, überstreicht der Punkt die zu zeichnende Ellipse. Der Beweis ergibt sich aus der Parameterdarstellung und der Interpretation des Parameters als Winkel des Papierstreifens mit der -Achse (s. Bild).


Eine weitere technische Realisierung des gleitenden Streifens kann man auch mit Hilfe eines Paares cardanischer Kreise erreichen (s. Animation). Der große Kreis hat den Radius .
-
 Ellipse: 1. Papierstreifenmethode
Ellipse: 1. Papierstreifenmethode -
 Ellipsen (rot, cyan) mit cardanischen Kreisen
Ellipsen (rot, cyan) mit cardanischen Kreisen


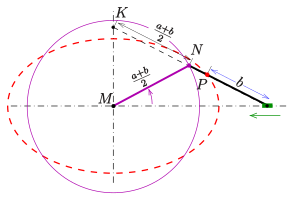
Eine Variation der 1. Papierstreifenmethode[17] geht von der Beobachtung aus, dass der Mittelpunkt des Papierstreifens sich auf dem Kreis mit Mittelpunkt und Radius bewegt. Man kann also den Papierstreifen in der Mitte (Punkt ) trennen und an dieser Stelle ein Gelenk einfügen und den zuvor auf der -Achse gleitenden Punkt in den Mittelpunkt der Ellipse verlegen. Nach dieser Operation bleibt das abgeknickte Ende des Papierstreifens fest (im Punkt ) und der unveränderte Teil des Streifens samt dem Punkt bewegt sich wie zuvor. Der Vorteil dieser Variation ist: Man benötigt nur einen technisch anspruchsvollen Gleitschuh. Auch gegenüber der cardanischen Realisierung der 1. Papierstreifenmethode ist diese Variation technisch einfacher.
Man beachte, dass immer dasjenige Ende des Streifens, das auf der Nebenachse gleitet, in den Mittelpunkt verlegt wird!


-
 Abgeknickter Papierstreifen
Abgeknickter Papierstreifen -
 Animation mit abgeknicktem Papierstreifen
Animation mit abgeknicktem Papierstreifen



2. Methode:
Die zweite Papierstreifenmethode geht von einem Papierstreifen der Länge aus. Man markiert den Punkt, der den Streifen in zwei Teile der Längen und zerlegt. Der Streifen wird so auf den Achsen positioniert, wie im Bild zu sehen ist. Der Teil, der die Länge besitzt, liegt zwischen den Achsen. Das freie Ende beschreibt dann die zu zeichnende Ellipse. Der Beweis ergibt sich aus der Zeichnung: Der Punkt kann durch die Parameterdarstellung beschrieben werden. Dabei ist der Steigungswinkel des Papierstreifens.

Diese Methode benötigt zu ihrer technischen Realisierung auch zwei Gleitschuhe, ist aber flexibler als die erste Papierstreifenmethode. Sie ist die Grundlage für viele Ellipsenzirkel (s. Weblink Ellipsenzirkel).
Bemerkung: Auch hier ist eine Variation durch Abknicken des Streifenteils zwischen den Achsen möglich. Es ist dann, wie bei der ersten Methode, nur ein Gleitschuh nötig.
-
 Animation der 2. Papierstreifenmethode
Animation der 2. Papierstreifenmethode -
 Ellipsenzirkel von Benjamin Bramer
Ellipsenzirkel von Benjamin Bramer -
 Abgeknickter Papierstreifen
Abgeknickter Papierstreifen




Approximation mit Scheitelkrümmungskreisen
Aus der Formelsammlung (s. unten) ergibt sich:
- Der Krümmungsradius für die Hauptscheitel ist
- der Krümmungsradius für die Nebenscheitel ist


Die Zeichnung zeigt eine einfache Methode, die Krümmungsmittelpunkte des Scheitels und des Nebenscheitels zeichnerisch zu bestimmen:



- Markiere den Hilfspunkt und zeichne die Gerade .
- Zeichne die Gerade durch , die senkrecht zur Geraden verläuft.
- Die Schnittpunkte dieser Geraden mit den Ellipsenachsen sind die gesuchten Krümmungsmittelpunkte (Beweis: einfache Rechnung).



Die Krümmungsmittelpunkte der restlichen Scheitel ergeben sich aus Symmetrie. Man zeichnet die beiden restlichen Scheitelkrümmungskreise. Mit Hilfe eines Kurvenlineals lässt sich dann eine gute Näherung der Ellipse zeichnen.
Steiner-Erzeugung einer Ellipse (Parallelogramm-Methode)

Die folgende Idee, einzelne Punkte einer Ellipse zu konstruieren, beruht auf der Steiner-Erzeugung eines Kegelschnitts (nach dem Schweizer Mathematiker Jakob Steiner):
- Hat man für zwei Geradenbüschel in zwei Punkten (alle Geraden durch den Punkt bzw. ) eine projektive, aber nicht perspektive Abbildung des einen Büschels auf das andere, so bilden die Schnittpunkte zugeordneter Geraden einen nichtausgearteten Kegelschnitt.[18][19]


Für die Erzeugung einzelner Punkte der Ellipse gehen wir von den Geradenbüscheln in den Scheiteln aus. Sei nun der obere Nebenscheitel der Ellipse und . Dann ist der Mittelpunkt des Rechtecks . Wir unterteilen die Rechteckseite in gleiche Stücke, übertragen diese Unterteilung mittels einer Parallelprojektion in Richtung der Diagonalen auf die Strecke (s. Bild) und nummerieren die Unterteilungen wie im Bild. Die benutzte Parallelprojektion zusammen mit der Umkehrung der Orientierung vermittelt die nötige projektive Abbildung der Büschel in und . Die Schnittpunkte der zugeordneten Geraden und liegen dann auf der durch die Vorgaben (3 Punkte, 2 Tangenten) eindeutig bestimmten Ellipse. Mit Hilfe der Punkte lassen sich Punkte auf dem 2. Viertel der Ellipse bestimmen. Analog erhält man Punkte der unteren Hälfte der Ellipse.









Bemerkung:
a) Benutzt man statt der Scheitel zwei Punkte eines anderen Durchmessers, so muss man für einen Punkt des konjugierten Durchmessers wählen und arbeitet dann mit einem Parallelogramm statt eines Rechtecks. Daher rührt auch der manchmal gebräuchliche Name Parallelogramm-Methode.
b) Den Beweis dieser Methode kann man auch am Einheitskreis nachrechnen. Da Teilverhältnisse und Parallelität bei affinen Abbildungen invariant bleiben, ist der Beweis dann auch allgemeingültig. (Eine Ellipse ist ein affines Bild des Einheitskreises!)
Auch für Parabel und Hyperbel gibt es Steiner-Erzeugungen.
Ellipsen in der Computergrafik
Besonders in der Computergrafik lohnt sich die Ableitung einer Ellipse aus einer Kreisform. Eine achsenparallele Ellipse ist dabei einfach ein Kreis, der in einer der Koordinatenrichtungen gestaucht oder gedehnt, mit anderen Worten: anders skaliert wurde. Eine allgemeine, in beliebigem Winkel gedrehte Ellipse kann man aus so einer achsenparallelen Ellipse durch Scherung erhalten, s. a. Bresenham-Algorithmus. Die Punkte werden also numerisch berechnet und gezeichnet.
Beispiele
- Schaut man schräg auf einen Kreis (beispielsweise auf die Deckfläche eines Kreiszylinders), so erscheint dieser Kreis als Ellipse, präziser: Eine Parallelprojektion bildet Kreise im Allgemeinen auf Ellipsen ab.
- In der Astronomie kommen Ellipsen häufig als Bahnen von Himmelskörpern vor. Nach dem ersten Keplerschen Gesetz bewegt sich jeder Planet auf einer Ellipse um die Sonne, wobei diese in einem der beiden Brennpunkte ruht. Entsprechendes gilt für die Bahnen von wiederkehrenden (periodischen) Kometen, Planetenmonden oder Doppelsternen. Allgemein ergeben sich bei jedem Zweikörperproblem der Gravitationskraft je nach Energie Ellipsen-, Parabel- oder Hyperbelbahnen.
-
 Steiner-Inellipse (blau) mit Steiner-Ellipse (rot)
Steiner-Inellipse (blau) mit Steiner-Ellipse (rot) -
 Beispiel einer Inellipse
Beispiel einer Inellipse


- Für jeden zwei- oder dreidimensionalen harmonischen Oszillator erfolgt die Bewegung auf einer Ellipsenbahn. So schwingt etwa der Pendelkörper eines Fadenpendels näherungsweise auf einer elliptischen Bahn, falls die Bewegung des Pendelfadens nicht nur in einer Ebene erfolgt.
- In der Dreiecksgeometrie gibt es Steiner-Ellipsen, Inellipsen (Steiner-Inellipse, Mandart-Ellipse).
Formelsammlung (Ellipsengleichungen)
Ellipsengleichung (kartesische Koordinaten)
Mittelpunkt ,


Aufgelöst nach :


Die letzte Form ist praktisch, um eine Ellipse mit Hilfe der beiden Bahnelemente, numerische Exzentrizität und große Halbachse, darzustellen.
Mittelpunkt , Hauptachse parallel zur -Achse:


Ellipsengleichung (Parameterform)
Mittelpunkt , Hauptachse als -Achse:

Mittelpunkt , Hauptachse parallel zur -Achse:

Mittelpunkt , Hauptachse um bezüglich -Achse rotiert:


Dabei bezeichnet den Parameter dieser Darstellung. Dieser entspricht nicht dem Polarwinkel zwischen der -Achse und der Geraden, die durch den Ursprung und den jeweiligen Ellipsenpunkt führt, sondern z. B. dem Polarwinkel zwischen der -Achse und der Geraden, die durch den Ursprung und den Punkt mit gleicher -Koordinate wie der Ellipsenpunkt jedoch auf dem Kreis mit Radius führt (vgl. Konstruktion nach de la Hire). In der Astronomie heißt dieser Parameter bei Keplerellipsen die exzentrische Anomalie, bei Meridianellipsen in der Geodäsie heißt er parametrische oder reduzierte Breite, vgl. Referenzellipsoid.
Für nicht rotierte Ellipsen, also , hängt der Polarwinkel , der durch definiert ist, mit dem Parameter zusammen über:



Diese Beziehung erlaubt eine anschauliche Interpretation des Parameters : Streckt man die -Koordinate eines Ellipsenpunktes um den Faktor , so liegt dieser neue Punkt auf einem Kreis mit Radius und demselben Mittelpunkt wie die Ellipse. Der Parameter ist nun der Winkel zwischen der -Achse und der Verbindungslinie :




Ellipsengleichung (Polarkoordinaten bzgl. des Mittelpunkts)
Hauptachse waagrecht, Mittelpunkt als Pol, Polarachse längs Hauptachse nach rechts:
![{\displaystyle r(\varphi )={\frac {ab}{\sqrt {a^{2}\sin ^{2}\varphi +b^{2}\cos ^{2}\varphi }}}={\frac {b}{\sqrt {1-\varepsilon ^{2}\cos ^{2}\varphi }}}\in [b,a]\quad {\text{mit}}\quad 0\leq \varphi <2\pi }](https://wikimedia.org/api/rest_v1/media/math/render/svg/c8dc6a96d5f39639f62b3e38193d29508b588b9e)



In kartesischen Koordinaten ausgedrückt, parametrisiert durch den Winkel der Polarkoordinaten, wobei der Mittelpunkt der Ellipse bei und ihre Hauptachse entlang der -Achse liegt:

- Herleitung
Aus der Ellipsengleichung in kartesischen Koordinaten und der Parametrisierung der kartesischen in Polarkoordinaten und folgt:




Umstellen und Radizieren liefert den Radius abhängig vom Polarwinkel.
Ellipsengleichung (Polarkoordinaten bzgl. eines Brennpunkts)
Hauptachse waagrecht, rechter Brennpunkt als Pol, Polarachse längs Hauptachse nach rechts (Halbparameter ):

![{\displaystyle r_{\mathrm {R} }(\varphi _{\mathrm {R} })={\frac {a^{2}-e^{2}}{a+e\cos \varphi _{\mathrm {R} }}}={\frac {p}{1+\varepsilon \cos \varphi _{\mathrm {R} }}}\in [r_{\mathrm {peri} },r_{\mathrm {apo} }]\quad {\text{mit}}\quad 0\leq \varphi _{\mathrm {R} }<2\pi }](https://wikimedia.org/api/rest_v1/media/math/render/svg/bfa9c4f788d7c2b53d3f7a8d8b5d7ca0bbb85f10)
Hauptachse waagrecht, linker Brennpunkt als Pol, Polarachse längs Hauptachse nach rechts:
![{\displaystyle r_{\mathrm {L} }(\varphi _{\mathrm {L} })={\frac {a^{2}-e^{2}}{a-e\cos \varphi _{\mathrm {L} }}}={\frac {p}{1-\varepsilon \cos \varphi _{\mathrm {L} }}}\in [r_{\mathrm {peri} },r_{\mathrm {apo} }]\quad {\text{mit}}\quad 0\leq \varphi _{\mathrm {L} }<2\pi }](https://wikimedia.org/api/rest_v1/media/math/render/svg/1270348737b4303ae3564fde78beba3463dc019d)
Der Wertebereich der Radien erstreckt sich von der Periapsisdistanz bis zur Apoapsisdistanz , die folgende Werte haben:



In kartesischen Koordinaten ausgedrückt, parametrisiert durch den Winkel bzw. der Polarkoordinaten, wobei der rechte Brennpunkt der Ellipse bei , der linke Brennpunkt bei liegt:






Der Winkel bzw. , je nachdem, welcher Pol Bezugspunkt ist, heißt in der Astronomie die wahre Anomalie.
- Herleitung
Man betrachtet ein Dreieck, das von den beiden Fixpunkten , und einem beliebigen Punkt auf der Ellipse aufgespannt wird.


Die Abstände zwischen diesen Punkten betragen: sowie und nach der Definition der Ellipse . Der Winkel bei sei . Mit dem Kosinussatz gilt nun:





Analog verläuft die Herleitung für den rechten Pol. Die Abstände lauten und und . Der Winkel bei sei , da definiert ist, wobei den rechten Hauptscheitel markiert.






- Alternative Herleitung
Durch Gleichsetzen der zweier Darstellungen von erhält man:

![{\displaystyle \left.{\begin{array}{l}r_{\mathrm {L} }^{2}-r_{\mathrm {R} }^{2}=\left[y^{2}+(x+e)^{2}\right]-\left[y^{2}+(x-e)^{2}\right]=4ex=4a\varepsilon x\\r_{\mathrm {L} }^{2}-r_{\mathrm {R} }^{2}=(r_{\mathrm {L} }+r_{\mathrm {R} })(r_{\mathrm {L} }-r_{\mathrm {R} })=2a(r_{\mathrm {L} }-r_{\mathrm {R} })\end{array}}\right\}\implies r_{\mathrm {L} }-r_{\mathrm {R} }=2\varepsilon x}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8448d8fb13596dfb513a2aef5aeff3b53e09969f)
Dies entspricht einerseits mit und



und andererseits mit und :



Formelsammlung (Kurveneigenschaften)
Tangentengleichung (kartesische Koordinaten)
Mittelpunkt , Hauptachse als -Achse, Berührpunkt :


Mittelpunkt Hauptachse parallel zur -Achse, Berührpunkt :

Tangentengleichung (Parameterform)
Ein (unnormierter) Tangentenvektor an die Ellipse hat die Gestalt:

Die Tangentengleichung lautet in vektorieller Darstellung mit Mittelpunkt bei , Hauptachse als -Achse und Berührpunkt bei :

Beziehung zwischen Polar- und Normalenwinkel

Zwischen Polarwinkel und Normalenwinkel und Ellipsenparameter besteht folgender Zusammenhang (siehe nebenstehende Grafik)


- Herleitung
Der Zusammenhang des Polarwinkels und dem Steigungswinkel der Normalen (siehe Grafik rechts) lässt sich z. B. so finden:
Auflösen der Tangentengleichung nach

ergibt die Tangentensteigung als Koeffizient von zu


Mit erhält man den gesuchten Zusammenhang zwischen und .

Normalengleichung (kartesische Koordinaten)
Mittelpunkt , Hauptachse als -Achse, Berührpunkt :

oder auch

Normalengleichung (Parameterform)
Ein (unnormierter) Normalenvektor an die Ellipse hat die Gestalt:

Die Normalengleichung lautet in vektorieller Darstellung mit Mittelpunkt bei , Hauptachse als -Achse und Berührpunkt bei :

Krümmungsradien und -mittelpunkte
Krümmungsradius im Punkt :


Mittelpunkt des Krümmungskreises, Krümmungsmittelpunkt :


Krümmungsradius und -mittelpunkt in einem der beiden Hauptscheitel :


Krümmungsradius und -mittelpunkt in einem der beiden Nebenscheitel :


Formelsammlung (Flächeninhalt und Umfang)
Flächeninhalt
Mit den Halbachsen und :

Ist die Ellipse durch eine implizite Gleichung

gegeben, dann beträgt ihr Flächeninhalt

- Ellipsensektor
Für eine Ellipse mit den Halbachsen und und einen Sektor, der mit der großen Halbachse den Winkel einschließt, gilt:
![{\displaystyle \varphi \in \left]0,{\frac {\pi }{2}}\right[}](https://wikimedia.org/api/rest_v1/media/math/render/svg/88eaaad47eb1f3411844f2b0b60113462511a4c0)

Beschreibt man den Ellipsensektor statt durch den Polarwinkel durch den Parameter aus der Parameterdarstellung , so erhält man die Formel


Umfang
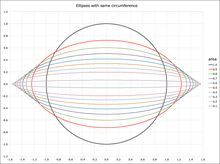
Formel
Der Umfang einer Ellipse mit großer Halbachse und kleiner Halbachse berechnet sich zu

- ,

wobei für das vollständige elliptische Integral zweiter Art steht. Die numerische Exzentrizität berechnet sich bei Ellipsen als

- .




Man beachte, dass bei der numerischen Berechnung elliptischer Integrale mittels Funktionsbibliotheken verschiedene Parameterkonventionen Verwendung finden.
Herleitung
Der Umfang einer Ellipse kann nicht exakt durch elementare Funktionen ausgedrückt werden. Er kann aber mithilfe eines Integrals dargestellt werden, das daher elliptisches Integral genannt wird.
Die Formel für die Bogenlänge einer Kurve lautet

- .

Für die Ellipse mit der Parameterdarstellung ergibt sich unter Berücksichtigung der Symmetrie für den Umfang

- .

Ausklammern von , Verwendung von und führt zu




Durch die Substitution erhalten wir die folgende Form:[20]

- .

Das Integral nennt man vollständiges elliptisches Integral zweiter Art.

Der Umfang der Ellipse ist damit
- .

Der Umfang hängt also von der numerischen Exzentrizität und der großen Halbachse ab. Mithilfe des nebenstehenden Diagramms kann bei gegebener Exzentrizität der Wert des Faktors für den Umfang abgelesen werden. liegt für jede Ellipse zwischen den Extremfällen (, entartete Ellipse als Linie) und (, Ellipse wird zum Kreis).



Aus dieser Formel resultiert jene zusätzliche Formel[21] für den Umfang, die sowohl für den Fall a > b als auch für den Fall a < b reell ist:
- .

Das Integral K nennt man vollständiges elliptisches Integral erster Art.
Reihenentwicklung
![{\displaystyle {\begin{aligned}U&=4aE(\varepsilon )=\\&=2a\pi \left(1-\sum _{i=1}^{\infty }\left(\prod _{j=1}^{i}{\frac {2j-1}{2j}}\right)^{2}{\frac {\varepsilon ^{2i}}{2i-1}}\right)=\\&=2a\pi \left[1-\left({\frac {1}{2}}\right)^{2}\varepsilon ^{2}-\left({\frac {1\cdot 3}{2\cdot 4}}\right)^{2}{\frac {\varepsilon ^{4}}{3}}-\ldots -\left({\frac {1\cdot 3\cdot 5\dotsm (2n-1)}{2\cdot 4\cdot 6\dotsm 2n}}\right)^{2}{\frac {\varepsilon ^{2n}}{2n-1}}-\ldots \right]\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/28d1c2b1d692c1319a8a807b8fa7da20a9dc331b)
Die numerische Exzentrizität ist gleich dem elliptischen Modul vom vollständigen Elliptischen Integral zweiter Art!
Für nahe 1 konvergiert diese Reihenentwicklung extrem langsam. Es empfiehlt sich daher eine numerische Integration, z. B. nach dem Romberg-Verfahren.
Eine Reihe, die schneller konvergiert, beruht auf der Gauß-Kummer-Reihe.[22] Für eine Ellipse mit den Halbachsen und (mit ) wird der Landensche Tochtermodul von der numerischen Exzentrizität , also der Modul definiert. Dann ergibt sich:[23]



Näherungen
Näherung mit Hilfe des arithmetischen Mittels der Halbachsen
-
- Genauigkeit dieser Formel

| Exz. ε | q = b / a | Fehler |
|---|---|---|
| = 0,000 | 1,000 | 0 (Kreis: exakt) |
| < 0,051 | > 0,9987 | < 10−7 |
| < 0,090 | > 0,996 | < 10−6 |
| < 0,1582 | > 0,9874 | < 10−5 |
| < 0,277 | > 0,961 | < 0,01 % |
| < 0,46 | > 0,885 | < 0,1 % |
| < 0,75 | > 0,66 | < 1 % |
| < 0,83 | > 0,55 | < 2 % |
| < 0,927 | > 0,37 | < 5 % |
| < 0,978 | > 0,21 | < 10 % |
| < 0,999 | > 0,044 | < 18,3 % |
| < 1,000 | > 0,000 | < 21,46 % |
Näherung mit Hilfe des quadratischen Mittels der Halbachsen


- Genauigkeit dieser Formel
| Exz. ε | q = b / a | Fehler |
|---|---|---|
| = 0,000 | = 1,0000 | 0 (Kreis: exakt) |
| < 0,016 | > 0,9999 | < 10−9 |
| < 0,026 | > 0,9997 | < 10−8 |
| < 0,047 | > 0,9989 | < 10−7 |
| < 0,084 | > 0,9965 | < 10−6 |
| < 0,149 | > 0,9888 | < 10−5 |
| < 0,262 | > 0,9651 | < 0,01 % |
| < 0,450 | > 0,8930 | < 0,1 % |
| < 0,720 | > 0,6937 | < 1 % |
| < 0,808 | > 0,5891 | < 2 % |
| < 0,914 | > 0,4037 | < 5 % |
| < 0,977 | > 0,2104 | < 10 % |
| < 1,000 | > 0,0000 | < 14,91 % |
Näherungsformel nach Srinivasa Ramanujan
- mit


Diese Näherung ist in einem weiten -Bereich von sehr genau und ergibt im ganzen Bereich stets einen etwas zu kleinen Wert, der monoton mit zunimmt.

Der relative Fehler beträgt:
| Bereich | rel. Fehler |
|---|---|
| 0,0000 ≤ ε ≤ 0,8820 | < 10−9 |
| 0,8820 < ε ≤ 0,9242 | < 10−8 |
| 0,9242 < ε ≤ 0,9577 | < 10−7 |
| 0,9577 < ε ≤ 0,9812 | < 10−6 |
| 0,9812 < ε ≤ 0,9944 | < 10−5 |
| 0,9944 < ε ≤ 0,9995 | < 10−4 |
| 0,9995 < ε ≤ 1,0000 | < 0,000403 |
Für erhält man statt 4 den nur geringfügig zu kleinen Wert


Schriftzeichen

Unicode enthält im Block Verschiedene Symbole und Pfeile vier Ellipsensymbole, die als Grafikzeichen oder Schmuckzeichen in beliebigem Text (auch Fließtext) verwendet werden können:
| Unicode | Zeichen | Name | LaTeX[24] |
|---|---|---|---|
| U+2B2C | ⬬ | black horizontal ellipse (Vollflächige horizontale Ellipse) | \EllipseSolid |
| U+2B2D | ⬭ | white horizontal ellipse (Hohle horizontale Ellipse) | \Ellipse |
| U+2B2E | ⬮ | black vertical ellipse (Vollflächige vertikale Ellipse) | Anm. |
| U+2B2F | ⬯ | white vertical ellipse (Hohle vertikale Ellipse) | Anm. |
Anm.
Durch Rotation der horizontalen Variante mit Hilfe des Paketes rotating, das bei den üblichen LaTeX-Distributionen vorinstalliert ist.
LaTeX kennt außerdem noch eine hohle horizontale Ellipse mit Schatten rechts: \EllipseShadow.[24]
Siehe auch
- Steiner-Ellipse
- Konfokale Kegelschnitte
- Gabriel Lamé verallgemeinerte die Ellipse zur laméschen Kurve (Superellipse).
- Ellipsoid
- Der Rotationskörper mit einem elliptischen Querschnitt ist ein Rotationsellipsoid.
- Homöoid
- Fokaloid
- Feynmans verschollene Vorlesung: Die Bewegung der Planeten um die Sonne
- Mittlere Bewegung
Weblinks
Wiktionary: Ellipse – Bedeutungserklärungen, Wortherkunft, Synonyme, Übersetzungen

Commons: Ellipsen – Sammlung von Bildern, Videos und Audiodateien
- Eric W. Weisstein: Ellipse. In: MathWorld (englisch).
- mathematische-basteleien.de
Berechnungen
- Formeln zum Ellipsenumfang mit Beispielrechnung
- Website zum Berechnen eines Ellipsenumfangs
- Tangenten und Schnitt mit einer Geraden (JavaScript)
- Ellipsenberechnung aus zwei Größen bzw. aus zwei, vier oder fünf Punkten; Tangenten, Normalen
Konstruktion
Für alle folgenden Links wird ein Java-Plug-in benötigt.
- Webseite mit der Möglichkeit, Ellipsenkonstruktionen interaktiv auszuprobieren
- Ellipsenzirkel
Literatur
- Cornelie Leopold: Geometrische Grundlagen der Architekturdarstellung. Verlag W. Kohlhammer, Stuttgart 2005, ISBN 3-17-018489-X, S. 55–66.
- Peter Proff: Die Deutung der Begriffe „Ellipse“, „Parabel“ und „Hyperbel“ nach Apollonios v. Perge. In: „Gelêrter der arzeniê, ouch apotêker“. Beiträge zur Wissenschaftsgeschichte. Festschrift zum 70. Geburtstag von Willem F. Daems. Hrsg. von Gundolf Keil, Horst Wellm Verlag, Pattensen/Hannover 1982 (= Würzburger medizinhistorische Forschungen, 24), ISBN 3-921456-35-5, S. 17–34.
Einzelnachweise
- ↑ Peter Proff: Die Deutung der Begriffe „Ellipse“, „Parabel“ und „Hyperbel“ nach Apollonios v. Perge. In: „gelêrter der arzeniê, ouch apotêker“. Beiträge zur Wissenschaftsgeschichte. Festschrift zum 70. Geburtstag von Willem F. Daems. Hrsg. von Gundolf Keil, Horst Wellm Verlag, Pattensen/Hannover 1982 (= Würzburger medizinhistorische Forschungen, 24), ISBN 3-921456-35-5, S. 17–34; hier S. 17.
- ↑ I. N. Bronstein, K. A. Semendjajew (Begründer), Günter Grosche (Bearb.), Eberhard Zeidler (Hrsg.): Teubner-Taschenbuch der Mathematik. Teubner, Stuttgart 1996, ISBN 3-8154-2001-6, S. 24.
- ↑ Vgl. z. B. Annette Werner: Skript zur Vorlesung Geometrie. (PDF; 241 kB). Bei: Uni-Frankfurt.de.
- ↑ J. Hoschek, D. Lasser: Grundlagen der geometrischen Datenverarbeitung. Springer-Verlag, 1989, ISBN 3-519-02962-6, S. 147.
- ↑ Wikibooks: Beweisarchiv: Geometrie: Satz vom Flüstergewölbe.
- ↑ Diese und die folgenden Aussagen finden sich in Bosch: Mathematik-Taschenbuch. Dritte Auflage. R. Oldenbourg Verlag, München/Wien 1991, S. 227 f.).
- ↑ Wikibooks: Beweisarchiv: Geometrie: Konjugierte Durchmesser.
- ↑ Siehe: Cornelie Leopold, S. 55.
- ↑ E. Hartmann: Planar Circle Geometries, an Introduction to Möbius-, Laguerre- and Minkowski-planes. (PDF; 870 kB). S. 55.
- ↑ W. Benz: Vorlesungen über Geometrie der Algebren. Springer (1973).
- ↑ Frans van Schooten: EXERCITATIONUM MATHEMATICARUM LIBRI QUINQUE. Lugdunum Batavorum [= Leiden]: Johannes Elsevirius, 1656–1657, Inhaltsübersicht, S. 7 Online-Kopie (Google).
- ↑ Frans van Schooten: EXERCITATIONUM MATHEMATICARUM, LIBER IV. SIVE DE ORGANICA CONICARUM SECTIONUM IN PLANO DESCRIPTIONE, … Titelseite, S. 293 Online-Kopie (Google).
- ↑ Frans van Schooten: EXERCITATIONUM MATHEMATICARUM LIBER IV … Gärtnerkonstruktion, S. 325–326 Online-Kopie (Google).
- ↑ Frans van Schooten: EXERCITATIONUM MATHEMATICARUM LIBER IV … Ellipsenzirkel, S. 341–343 Online-Kopie (Google).
- ↑ Karl Strubecker: Vorlesungen über darstellende Geometrie. Vandenhoeck & Ruprecht, Göttingen, 1967, S. 25–26 (Online-Kopie)
- ↑ Max Steck: Proklus Diadochus, Euklid – Kommentar. Hrsg.: Max Steck. Deutsche Akademie der Naturforscher Leopoldina, Halle an der Saale 1945, S. 240.
zitiert nach
Dietmar Herrmann: Die antike Mathematik. Eine Geschichte der griechischen Mathematik, ihrer Probleme und Lösungen. Springer Spektrum, Berlin, Heidelberg 2010, ISBN 978-3-642-37611-5, S. 388 f., doi:10.1007/978-3-642-37612-2_25 (google.de). - ↑ J. van Mannen: Seventeenth century instruments for drawing conic sections. In: The Mathematical Gazette. Vol. 76, 1992, S. 222–230.
- ↑ Erich Hartmann: Projektive Geometrie. (PDF; 180 kB). Kurzskript, TU Darmstadt, S. 12–16.
- ↑ Jacob Steiner’s Vorlesungen über synthetische Geometrie. B. G. Teubner, Leipzig 1867. 2. Teil, S. 96. (eingeschränkte Vorschau in der Google-Buchsuche).
- ↑ Das Minuszeichen wird durch die Substitution der Integrationsgrenzen eliminiert.
- ↑ Eric W. Weisstein: Elliptic Integral. Abgerufen am 3. September 2021 (englisch).
- ↑ Eine von der hier aufgeführten Formel abweichende Form (die natürlich die gleichen Werte erzeugt) ist auf math.wolfram.com angeführt.
- ↑ Gérard P. Michon: Perimeter of an Ellipse. Abschnitt Very Precise Fast Computations. Auf: numericana.com. Abgerufen am 26. Juli 2015.
- ↑ a b Scott Pakin: The Comprehensive LaTeX Symbol List. (PDF; 31 MB) 3. Januar 2024, archiviert vom Original am 8. April 2024; abgerufen am 8. April 2024 (englisch, siehe Tabelle „bbding Geometric Shapes“; der Originallink führt zu einem Spiegelserver des CTAN; zum Archivlink vergleiche Datei:Comprehensive LaTeX Symbol List.pdf).











