Polárkoordináta-rendszer

A matematikában és a geodéziában a polárkoordináta-rendszer olyan kétdimenziós koordináta-rendszer, mely a sík minden pontját egy szög és egy távolság adattal látja el. Tulajdonképpen itt a sík egy paraméterezéséről beszélhetünk. A polárkoordináták a sík egy kitüntetett pontjától mért távolságból és egy, a ponton átmenő, vektorosan definiált egyenestől mért irányszögből állnak. Konkrétan a hozzárendelés, mely a sík derékszögű koordináta-rendszerben megadott (x,y) koordinátájú pontjait ellátja polárkoordinátákkal a következő kapcsolatban van a derékszögű koordinátákkal:

ahol r a sík P(x,y) pontjának origótól mért távolsága (nemnegatív szám), φ pedig az x tengely és az OP szakasz irányított szögtávolsága (ez radiánban 0 és 2π közötti érték, fokban 0° és 360° közötti). A koordinátavonalakat ebben a rendszerben egyfelől azon pontok alkotják, melyek mentén a φ koordináta állandó, vagyis az origóból induló félegyenesek, másrészt azok, amelyek mentén r állandó, vagyis az origó középpontú körök. A matematikában a szög előjeles, a pozitív forgásirány az óramutató járásával ellentétes irány. A geodéziában az óramutató járása szerinti irány a pozitív. A polárkoordináta-rendszerek a derékszögű görbe vonalú koordináta-rendszerek speciális esetei.
A polárkoordináta rendszert olyankor célszerű használni az elterjedtebb Descartes-féle derékszögű koordináta-rendszerrel szemben, ha a pontok helyének megadása egyszerűbb távolságokkal és szögekkel, mint két egymásra merőleges szakasz hosszával. Ilyen terület például a geodézia, ahol a derékszögű koordináta-rendszer az ortogonális mérésnek felel meg, amit mérőszalaggal és derékszögprizmával végeznek. A pontos szögmérő műszerek (teodolit) elterjedésével a poláris mérés került előtérbe, amely távolság- és szögmérési adatokból számít koordinátákat.
Definíció

Amikor polárkoordinátával jellemezzük a sík egy P pontját, akkor a pontot két adatával adjuk meg. Ehhez először rögzítenünk kell egy középpontot, a pólust (vagy a derékszögű koordináta rendszerrel történő összevetésben az origót), továbbá egy origó végpontú félegyenest, mely a kezdő irányt rögzíti. A polárkoordináták közül a távolsági adat a kezdőponttól adott távolságban lévő pontok halmazát, azaz egy kört határoz meg. Az irányszög a kezdő iránytól adott szögben látszó pontok halmazát, azaz egy félegyenest határoz meg. A körív és a félegyenes metszéspontja lesz a polárkoordinátákkal megadott pont.
Az r-rel jelölt koordináta, a sugár, a pont origótól mért távolsága, néha R-rel vagy ρ-val is jelölik. Ha O jelöli az origót és OA jelöli a kezdő irány félegyenesét, akkor a P pont φ koordinátája nem más, mint az OP félegyenes és az OA félegyenes irányított szöge. Az irányítás azt jelenti, hogy a szöget az OA félegyenestől az óramutató járásával ellentétes körüljárással mérjük. A szöget gyakran még θ-val, α-val és még sok mással is jelölik. A szög megadása az SI-nek megfelelő módon radiánban történik, de sokszor természetesen fokokat is használnak.
Átváltás a derékszögű és polárkoordináták között
Világos, hogy ha az r és a φ adott a sík egy P pontjára vonatkoztatva, akkor az szögfüggvények 90°-nál nagyobb szögekre való kiterjesztésének definíciója folytán a derékszögű koordinátákba való átváltás a következő. Ha a kezdő irányt az x tengelynek fogjuk fel és ennek origó körüli +90°-os elforgatottját az y tengelynek, akkor a derékszögű koordináták:


Ha a derékszögű koordináták az adottak, akkor az x és y adatokból a távolságot például a Pitagorasz-tétellel számíthatjuk:

A φ értékéhez a szögfüggvényértékek visszakeresésének módszerével juthatunk. Itt természetesen vigyázni kell arra – mint minden esetben, amikor trigonometrikus értékekből következtetünk vissza szögértékre –, hogy helyes szöget adjon vissza a számítás. Ehhez a következőket kell szem előtt tartani.
- = 0 esetén φ a polárkoordináta-rendszerben határozatlan, azaz bármely valós érték alkalmas lenne az origó szögének jellemzésére, hiszen ez az érték egyáltalán nem jellemzője az origónak
- ≠ 0 esetén ahhoz, hogy a φ polárkoordinátára egyetlen értéket kapjunk, 2π hosszúságú intervallumra kell korlátozódnunk. A szokásos tartományok [0, 2π) vagy (-π, π].

[0, 2π) illetve [0, 360°) intervallumba eső szög esetén
A [0, 2π) tartományban az inverz szögfüggvények (arkusz függvények) segítségével kapjuk meg φ-t:

Az árkusz koszinusz leegyszerűsíti az esetszétválasztást:

(−π, π] illetve (−180°,180°] intervallumba eső szög esetén
A (-π, π] tartományban pedig a φ polárszög értéke:

Egyes programozási nyelvek és alkalmazások tartalmaznak egy arctan2(x, y) függvényt, ami figyelembe veszi a fenti esetszétválasztást, és tetszőleges esetén képes φ értéket számolni.

Ugyanezt az eredményt kapjuk, ha az koordinátájú pontot azonosítjuk a komplex számmal, és az


szöget az argumentumfüggvénnyel számoljuk.

Az árkusz koszinusz segítségével az esetszétválasztás egyszerűsíthető:

A középponti és a kerületi szögek tételéből tudjuk, hogy egy körben a középponti szög kétszer akkora, mint a hozzá tartozó kerületi szög. Így a szög kiszámítása az árkusz tangens használatával is egyszerűsíthető:


A szög eltolása
Egyes alkalmazásokban más szögtartományokat használnak. Legyen az alsó határ! Ekkor az


egyenlet a szöget a kívánt intervallumba transzformálja, így az is teljesül, hogy . Itt az alsó egészrész, vagyis minden valós számhoz a legnagyobb egész számot rendeli, ami nem nagyobb, mint .




Koordinátavonalak
Egy koordinátákkal adott pont koordinátavonalai:

- és
- ,


azaz egy, a középpontból kiinduló félegyenes, és egy origó körüli sugarú kör.

Példák polárkoordinátákra
Egyes algebrai görbék polárkoordinátás egyenletekkel definiálhatók. Sok esetben az ilyen egyenletek egyszerűen az sugarat θ függvényében adják meg. Az eredményül kapott görbe pontjait alakban kapjuk meg és a görbét polárkoordinátás függvény grafikonjának tekinthetjük.

A szimmetria különböző estei az függvényből vezethetők le. Ha = , akkor a görbe szimmetrikus a (0°/180°) egyenesre, ha = , akkor a függőleges (90°/270°) egyenesre szimmetrikus és ha = , akkor a görbe centrálisan szimmetrikus az origóra.




Bizonyos görbék függvénye sokkal egyszerűbben írható fel polárkoordináták segítségével, mint derékszögű koordinátákkal. Az ismertebbek közé tartozik az arkhimédészi spirál, a lemniszkáta, a Pascal-féle csigagörbe és a kardioid.
Kör
Az (0, φ) középpontú és sugarú kör általános egyenlete


Ez különböző módon egyszerűbbé tehető, hogy egyes speciális eseteknek megfeleljen, például ez az egyenlet

olyan sugarú kört ír le, melynek középpontja a pólusban van.
Egyenes


= egyenlettel leírható arkhimédészi spirál egyik ága

Sugárirányú egyenesek (vagyis, amelyek a póluson átmennek) egyenlete:
- ,

ahol φ az egyenes szöge, azaz φ = arctan , ahol az egyenes meredeksége (iránytangense) derékszögű koordináta-rendszerben. Nem sugárirányú egyenes egyenlete, mely a sugárirányú = φ egyenletű egyenesre merőleges és azt a (0, φ) pontban metszi:


Arkhimédészi spirál
Az arkhimédészi spirál egy Arkhimédész által felfedezett híres spirális görbe, melyet szintén le lehet írni egyszerű polárkoordinátás egyenlettel:

Az a paraméter változtatásával megfordul a spirális, a b viszont a spirális egy sugárhoz tartozó pontjainak távolságát adja meg, ami egy spirálisnál állandó érték. Az arkhimédészi spirálnak két ága van, az egyikre θ > 0, a másikra θ < 0. A két ág simán csatlakozik egymáshoz a pólusban. Az egyik ág tükörképe a 90°/270° egyenesre, mint tükörtengelyre a másik ágat adja. Ez a görbe az egyik első görbe volt a kúpszeletek után, mely a matematikai értekezésekben például szolgált a polárkoordinátás leírásra.
Kúpszeletek
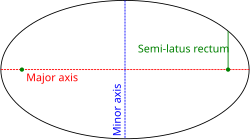
A kúpszelet polárkoordinátás egyenlete, ha a pólusban van az egyik fókusza és a másik valahol a 0°-os sugáron (így a főtengelye a poláris tengelyen fekszik):

ahol e az excentricitás, és a semi-latus rectum (a fókuszból a főtengelyre a görbéig húzott egyenes szakasz hossza, ld. az ábrát). Ha e > 1, akkor az egyenlet hiperbolát definiál, ha e = 1, akkor a parabola egyenlete, míg e < 1 esetén a görbe ellipszis. Speciális eset az e = 0 az utóbbinál, amikor is az ellipszis sugarú körré fajul.

Komplex szám trigonometrikus alakja
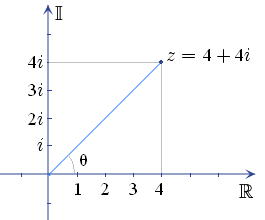
Minden komplex szám felfogható úgy, hogy az egy pont a komplex síkon, és így kifejezhető, mint egy derékszögű koordináta-rendszer egy pontja, vagy egy pont a polárkoordináta rendszeren. Derékszögű koordináta-rendszerben egy z szám így írható fel:

ahol i a képzetes egység, vagy polárkoordinátás alakba átírva:

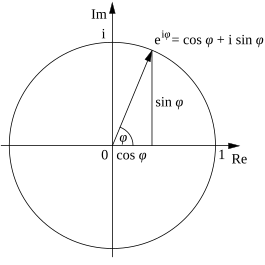
és innen

ahol e az Euler-féle szám, melyek azonosak az Euler-formula értelmében.
(Megjegyzendő, hogy ez a képlet ugyanúgy, mint minden más összefüggés, mely szögek hatványait tartalmazza, feltételezi, hogy a szögek radiánban vannak megadva.) A komplex számok derékszögű és polárkoordinátás alakjai közötti konverzió a fentebb leírt szabályok szerint történik.
A komplex számok szorzása, osztása és hatványozása általában sokkal egyszerűbb a poláris alakkal, mint a derékszögű változattal. A hatványozás szabályai szerint
- A szorzás:

- Az osztás:

- A hatványozás (De Moivre-képlet):

Polárkoordináta-transzformáció az analízisben
Polárkoordináta-transzformációt gyakran alkalmaznak olyan kétváltozós függvények esetén, melyek valamilyen középpontos szimmetriát mutatnak. Ekkor az D &sunbe; R × R halmazon értelmezett

függvény helyett az

függvényt vizsgálják, ahol a

leképezés a polártranszformáló függvény.
Megjegyzendő, hogy G csak majdnem mindenhol injektív. G legbővebb injektivitási tartománya a

Folytonosság, határérték
Kétváltozós függvény origóbeli határértékének létezését polárkoordinátákban a következőképpen mutathatjuk ki. Ha f kétváltozós függvény és A valós szám, akkor

Például az

függvénynek létezik az origóban határértéke, mert az x = r cos(φ), y = r sin(φ) helyettesítéssel:


amely (0-hoz tartó) (korlátos) alakú és így a 0-hoz tart. Míg az

függvénynek nem létezik az origóban határértéke, helyettesítve az

függvényt kapjuk, ami az φ = 0 esetén a 0 értéket veszi föl, de φ = π/4-re az 1/2-et adja, így létezik két irány, amelyek felől a 0-hoz tartva az r-rel a függvényértékek sorozata nem azonos számokhoz tart.
Polárkoordinátás görbe érintője
Az poláris görbe érintője meredekségének meghatározásához bármelyik pontban először írjuk át a görbe egyenletét paraméteres egyenletrendszerbe:


Mindkét egyenletet θ szerint deriválva ezt kapjuk:


A második egyenletet az elsővel osztva megkapjuk a görbe egy tetszőleges (r, ) pontjában az érintő meredekségét a derékszögű koordináta-rendszerben:

Szektortartomány területe


Jelölje R azt a területet, melyet az görbe és a = a és = b zár közre, ahol 0 < b − a < 2π. Ekkor az R területe:

Ez az eredmény a következőképpen vezethető le. Először az [a, b] intervallumot n számú részre bontjuk, ahol n tetszőleges pozitív egész szám. Így a részek Δθ ívhossza b − a (a terület teljes ívhossza) osztva a részek számával. Minden egyes i = 1, 2, …, n résznél legyen a rész szögfelezője és szerkesszünk olyan körcikket, melynek középpontja a pólus, sugara , középponti szöge és ívhossza . Az egyes körcikkek területe ennélfogva: . Következésképpen a körcikkek összterülete:






A részterületek n számának növelésével a terület közelítése javul. Ha n → ∞, az összeg a fenti integrál Riemann összegéhez tart.
Integráltranszformáció
G folytonosan differenciálható (sőt, analitikus) az értelmezési tartománya belsején, Jacobi-mátrixa:
- és ennek determinánsa:


Legyen tehát a kétváltozós f valós függvény integrálható egy olyan T ⊆ R×R tartományon, mely polárkoordináta-hálózathoz jól illeszkedik. Ekkor az eredetileg x és y paraméterekkel megadott T = Tx,y tartományon az integrál kiszámítását visszavezethetjük a (0,+R) × (0,2π) tégla egy feltehetőleg T-nél alkalmasabb

részhalmazán történő integráljára:

Vektoranalízis
A vektoranalízist szintén lehet alkalmazni a polárkoordinátákra. Legyen egy helyvektor, ahol r és a t idő függvénye, pedig egy irányú egységvektor, pedig egy -re merőleges egységvektor. A helyvektor idő szerinti első és második deriváltja:






Lokális bázisvektorok és ortogonalitás
Egyenes vonalú koordináta-rendszerekben (lásd: affin koordináta-rendszer) a teljes vektortérnek van bázisa. Görbe vonalú koordináta-rendszerekben minden pontban külön bázissal kell számolni. A helyi és bázisvektorok a koordinátavonalak érintői, és a görbeegyenletekből adódnak azok paraméter szerinti deriválásával. Ugyanehhez az eredményhez eljuthatunk az helyvektor koordinátatranszformációjának parciális deriválásával az és koordináták szerint:




illetve
- és .


A bázisvektorok hossza
- és


és ortogonálisak egymásra, mivel:
- .

Így a koordinátavonalak merőlegesek egymásra, tehát a polárkoordináta-rendszer ortogonális koordináta-rendszer.
A tenzorszámításban a koordinátavonalakhoz érintőleges lokális koordináta-rendszerek a koordinátatranszformációk során kovariánsan viselkednek.
Metrikus tenzor
Egy kovariáns metrikus tenzor komponensei a kovariáns helyi bázisvektorok skaláris szorzatai:

- .

Az előző szakasz eredményeit felhasználva:
- .

Funkcionáldetermináns
A polárkoordinátákról az Descartes-koordinátákra való áttérés funkcionáldeterminánsa a Jacobi-mátrix determinánsa:


Felszínelem



A funkcionáldeterminánssal adódik a felszínelem polárkoordinátákban:

A felszínelem értelmezhető differenciális téglalapként, melynek szélessége és magassága .
Vonalelem
A fenti


transzformációegyenletekből következik, hogy


A kartesiánus vonalelemre teljesül, hogy:

amiből a polárkoordinátákra:

Sebesség és gyorsulás polárkoordinátákban
A mozgást sugaras és a rá merőleges érintőleges irányra bontjuk. Az sebességvektorra teljesül, hogy:


ahol és egységvektorok.


Az gyorsulásra:


Története
A szög és a távolság fogalmakat az ókorban a Krisztus előtti első évezredben már ismerték. Hipparkhosz elsőként (190–120) állított elő húrtáblázatot (a szinusztáblázat ősét), hogy a húr hosszának ismeretében meg lehessen találni a hozzá tartozó szöget. Ennek segítségével tudott polárkoordinátákat használni, és ezzel meghatározni bizonyos csillagok helyét. Műve azonban csak a koordináta-rendszernek csak egy részét ismertette.[1]
Arkhimédész A spirálokról című művében írt spirálokról, ahol a sugár a szög függvényében változik (lásd arkhimédészi spirál). Azonban ő sem írt a teljes koordináta-rendszerről.
Különböző leírások készültek arról, hogyan definiálható a polárkoordináta-rendszer egy formális koordináta-rendszer részeként. A téma történetét Julian Coolidge, a Harvard professzora foglalta össze Origin of Polar Coordinates című könyvében.[2] Eszerint Grégoire de Saint-Vincent és Bonaventura Cavalieri egymástól függetlenül vezették be a fogalmat a 17. század közepén. Saint-Vincent magánjellegű feljegyzéseiben 1625-ben írt róla, és 1647-ben jelentette meg művét. Cavalieri 1635-ben adta ki az első változatot, és az újabb, javított változatot 1653-ban. Cavalieri arra használta, hogy megoldjon egy arkhimédészi spirállal kapcsolatos problémát. Később Blaise Pascal polárkoordináta-rendszerrel számította ki parabolikus szögek hosszát.
Sir Isaac Newton az 1671-ben megírt, és 1736-ban kiadott Method of Fluxions című művében polárkoordináta-rendszerek közötti transzformációkról írt, a „Seventh Manner; For Spirals“ fejezetben. Emellett még kilenc más koordináta-rendszert is bevezetett.[3]
Jakob Bernoulli az Acta Eruditorum (1691) szakmai folyóiratban alkalmazott egy rendszert, ami egy egyenesből és egy rajta kijelölt pontból állt, melyet pólusnak nevezett. A koordinátákat a pólustól mért távolság és az egyenessel bezárt szög határozta meg. Bernoulli munkája bevezette a simulókör fogalmát is, melyet ezekkel a koordinátákkal határozott meg.
Gregorio Fontana a 18. században bevezette a polárkoordináták fogalmát az olasz nyelvbe. George Peacock 1816-ban bevezette ezt az angol nyelvbe, amikor Sylvestre Lacroix művét, a Differential and Integral Calculust fordította. [4][5]
Elsőként Alexis-Claude Clairaut gondolta tovább a polárkoordinátákat három dimenzióba, azonban ez végül csak Leonhard Eulernak sikerült.[2]
Fordítás
- Ez a szócikk részben vagy egészben a Polar coordinate system című angol Wikipédia-szócikk fordításán alapul. Az eredeti cikk szerkesztőit annak laptörténete sorolja fel. Ez a jelzés csupán a megfogalmazás eredetét és a szerzői jogokat jelzi, nem szolgál a cikkben szereplő információk forrásmegjelöléseként.
- Ez a szócikk részben vagy egészben a Polarkoordinaten című német Wikipédia-szócikk fordításán alapul. Az eredeti cikk szerkesztőit annak laptörténete sorolja fel. Ez a jelzés csupán a megfogalmazás eredetét és a szerzői jogokat jelzi, nem szolgál a cikkben szereplő információk forrásmegjelöléseként.
Jegyzetek
- ↑ Michael Friendly: Milestones in the History of Thematic Cartography, Statistical Graphics, and Data Visualization
- ↑ a b Julian Coolidge (1952). „[www-history.mcs.st-and.ac.uk The Origin of Polar Coordinates]” (59).
- ↑ C. B. Boyer (1949). „Newton as an Originator of Polar Coordinates” (56).
- ↑ Jeff Miller: Earliest Known Uses of Some of the Words of Mathematics
- ↑ David Eugene Smith.szerk.: Ginn and Co.: History of Mathematics (1925)
Források
- Pattantyús Gépész- és Villamosmérnökök Kézikönyve 1. kötet. Műszaki Könyvkiadó, Budapest, 1961
- W. Werner. Vektoren und Tensoren als universelle Sprache in Physik und Technik. Springer Vieweg










